

コラム
山洋電気の歩みと技術革新(32)



超高齢化社会を迎える日本では,高齢者がいつまでも,健康で,自立して生活できる社会が求められています。身体能力の低下にともない,動作が不自由な人や作業などで身体に障害がある人を支援する技術として,当社がアクチュエータとサーボアンプの開発に携わった「人にやさしいウェアラブルロボット」の開発技術を紹介します。
当社が開発に携わった「人にやさしいウェアラブルロボット」は,高齢者や患者の自立歩行支援,介護支援,障害者のリハビリ訓練を目的とした軽量かつ装着が容易で,動作時に拘束感が少ないロボティックウェアです。
主な特徴としては以下の2 点があげられます。
(1) 制御技術である同調制御
・ ロボットの動作により強制的に人の動きを改善させるのではなく,人と人との間でおこなわれている動作支援の協調動作を,人とロボットの間で実現することにより,より自然に人の動きを改善できます。
(2) 外装機構である非外骨格型構造
・ 従来の装置に多く見られる剛体金属の外骨格型構造ではなく,人体の骨格系を利用した樹脂製の非外骨格型構造であるため,軽量であると同時に装着が容易で,動作時の拘束感が非常に少ないという特長があります。
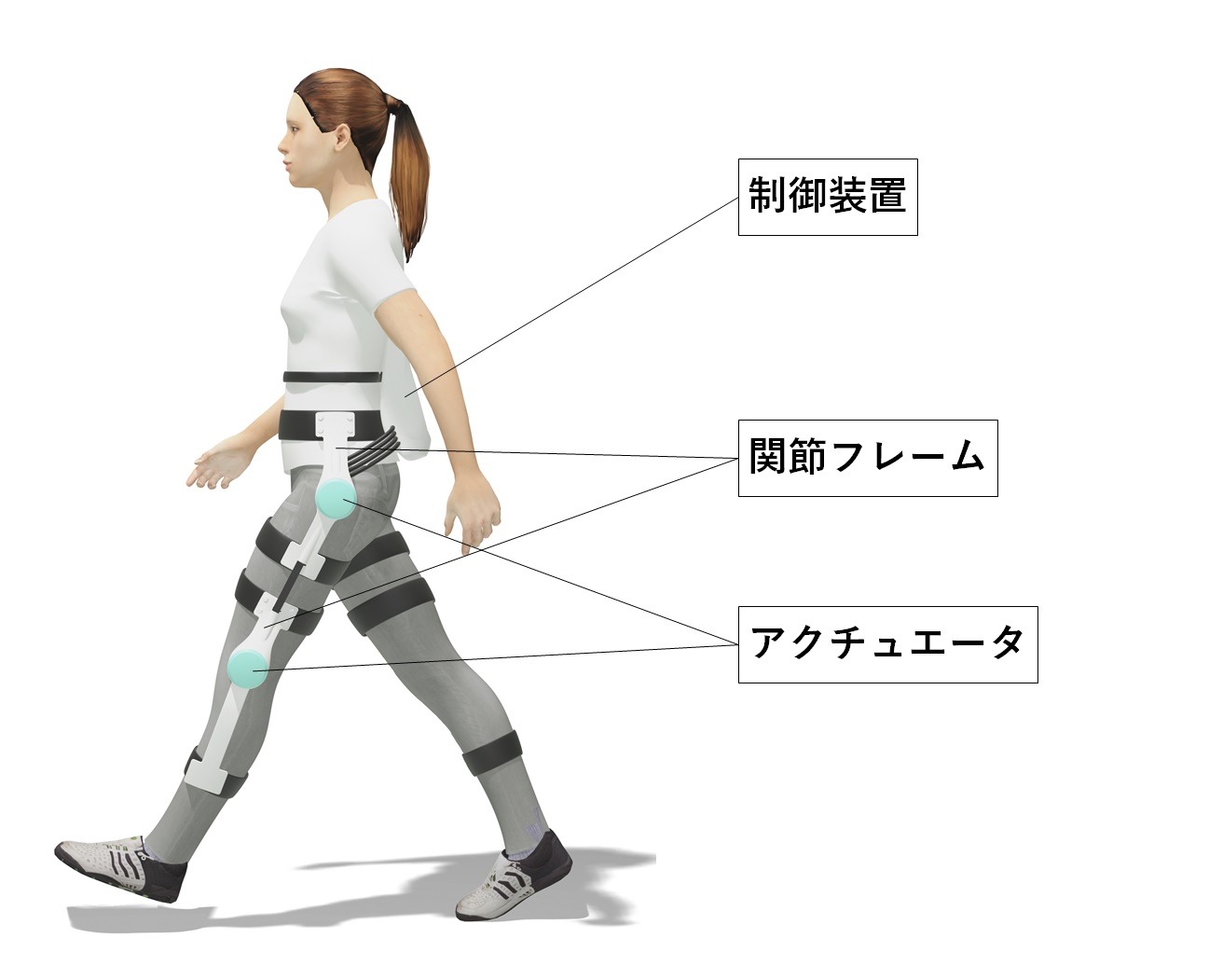
図1 ウェアラブルロボットの装置構成
図1は,ウェアラブルロボットの装置構成です。
図1 ウェアラブルロボットの装置構成
このウェアラブルロボットの主な構成は,人が装着する外装機構である関節フレーム,動作補助をおこなうアクチュエータユニット(4 軸),アクチュエータを制御する制御装置から構成されます。当社では,アクチュエータユニットのサーボモータと制御装置のサーボアンプの開発をおこないました。
アクチュエータは,減速機,モータ,エンコーダ,トルクセンサから構成されています。モータの形状は掌サイズの扁平タイプです。
ウェアラブルロボットでは,装置自体の重さや大きさが,装着者の体に余分な負担を生じることになるため,ほかのロボットに比べ,小型化・軽量化に関して,一層厳しい条件が要求されます。
そのため,小型化を実現するために,ベアリングとエンコーダをモータ電磁部の内側に配置した扁平構造としました。また,軽量化を実現するため,構造体の薄肉化などの軽量化設計により,拘束感が少ない人にやさしい機構を実現しています。
要介護者の自立支援を目的とした身体装着型ロボティックスーツのコンセプト“着る感覚で使える”を実現するため,モータを駆動するサーボアンプにおいても,小型・軽量化の取り組みをおこなっています。
駆動部を含むサーボシステム全体が,身体に装着されるため,着心地をそこなわないように,制御基板とパワー基板2枚構成のオープンフレームとしながらも,放熱性と安全性を確保しています。
軽量化と背面のコントローラボックスに収納できるサイズを実現し,着るというデザインに配慮した設計をおこないました。当社の標準的なサーボアンプは,CPU,ASIC,メモリーなど複数のLSI を使用して,モータ制御をおこなっています。サーボアンプは,部品点数を削減するために,CPU内蔵の電流検出機能やエンコーダインタフェース機能の活用,ASICで処理していた電流制御のソフトウェア化などに取り組み,1つのCPUで2軸のモータが制御できる制御回路を開発しました。そして,背中の制御装置内に格納できる小型・軽量な4 軸一体構造のサーボアンプとすることで,製品コンセプトである“着る感覚で使える”を実現しています。
サーボ技術は,産業機械に使われる技術であると思われがちですが,今回ご紹介したように,医療・福祉機器や食品用機器にもサーボ技術が貢献しています。これからも人と医療・福祉機器とが協調するためのサーボ技術を開発し,人々の健康と幸せに貢献できる製品とサービスを提供していきたいと思います。
※1 文献
Tsukahara et al.:Effects of gait support in patients with spinocerebellar degeneration by a wearable robot based on synchronization control, Journal of NeuroEngineering and Rehabilitation (2018.9)
公開日: