해결사례
소형 공간 절약형 EtherCAT 대응 모션 컨트롤러 란?
고정밀 위치결정 제어를 컴팩트하게 실현시킨 모션 컨트롤러「SANMOTION C S100」
정밀 기계 기구 메이커 F사(종업원수:약 210명)



자동화의 제조 라인에 있는 접착제나 씰제를 도포하는 자동 도포 장치 「씰링 머신」도 세계 각국에서 시장을 확대하고 있습니다. 이번에 씰링 머신을 제조 판매하고 있는 F사에서도 EtherCAT에 대응한 신모델의 씰링 머신을 개발하게 되었습니다. F사 시스템 개발부의 H씨는 이렇게 말합니다.
"EtherCAT가 주요 메이커에 채용된 것으로, 제조 라인을 구성하는 장치가 잇달아 EtherCAT에 대응하고 있습니다. 다른 제조 라인의 장치와의 친화성을 높이기 위해서도, EtherCAT 대응의 모션 컨트롤러를 찾게 되었습니다."
새로운 장치의 또 다른 과제는 소형 공간 절약화였습니다.
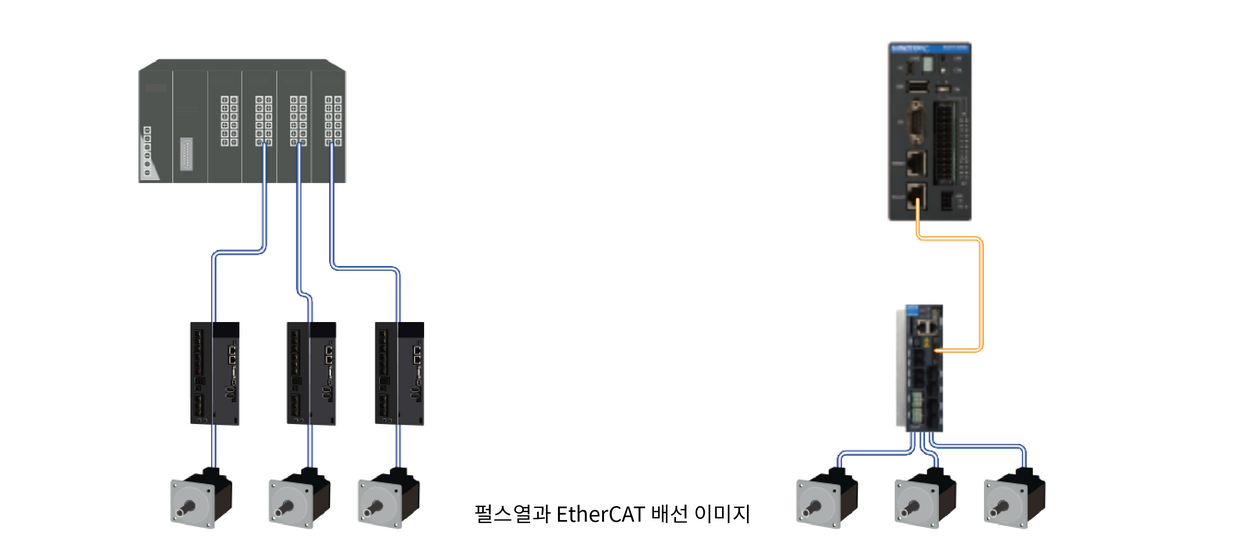
「현재의 PLC의 경우는, 모터를 1축 늘릴 때마다, 펄스열 유니트와 드라이버를 각각 증설할 필요가 있습니다. 유니트의 증설에 따라 배선의 수도 늘어나, 그들을 수납하는 배전반의 스페이스도 커집니다 "장치를 소형화하기 위해 이러한 장치 구성이 목이되었습니다."(H 씨)
또한 새로운 장치에서는 사이클 타임을 향상시키기 위해 기존 기계 이상의 고속성이 요구되었습니다. 씰링 머신의 역할은 정해진 위치에 정해진 양의 접착제를 효율적으로 도포하는 것입니다. 도포 대상은 직선뿐만 아니라 원호 등의 곡선도 혼재하고 있습니다. 따라서 여러 모터의 위치와 속도를 조정하면서 정확한 궤적을 그릴 필요가 있었습니다.
H씨는 궤적 제어를 실현할 수 있는 EtherCAT 대응의 모션 컨트롤러를 찾기 시작했습니다. 그러나 H 씨의 요건을 충족시키는 모션 컨트롤러를 찾을 수 없어서 막혔습니다.

해결책을 찾고 있던 H씨는, 별건으로 F사를 정기 방문하고 있던 산요전기의 영업 담당에 이러한 과제를 상담했습니다. 영업 담당은 현재의 과제와 시스템 요건을 상세히 청취하고 나중에 모션 컨트롤러「SANMOTION C S100」의 제안을 했습니다.
「모션 컨트롤러『SANMOTION C S100』은 EtherCAT의 사양인 사이클릭 위치 제어 모드를 지원하고 있어 각 축의 SANMOTION C를 2/1000초 단위의 통신 주기로 지령함으로써 고정밀 궤적 동작을 실현할 수 있다고 합니다. 타사의 EtherCAT 컨트롤러에서는 목표 위치의 좌표나 속도를 지정하는 프로파일 위치 제어 모드이므로, 위치 결정도 실링 머신의 동작 정밀도를 유지하면서 사이클 타임의 향상을 기대할 수 있습니다.
또한 모션 컨트롤러「SANMOTION C S100」과 다축 시스템을 이용한 공간 절약화의 제안을 받았습니다. 「업계 최소의 모션 컨트롤러「SANMOTION C S100」과 다축 클로즈드 루프 스테핑 시스템「SANMOTION Model No.PB」를 조합하는 것으로, 제어기기 스페이스를 최소화한 사례가 있다고 합니다.
지금까지의 장치에서는, 3축의 모터를 3축의 드라이버로 제어하고 있었습니다만, 산요전기의 다축 클로즈드 루프 스테핑 시스템「SANMOTION Model No.PB」를 이용하면, 3축의 모터를 1대의 드라이버로 제어할 수 있습니다. EtherCAT에서의 기기간의 접속은 1개의 케이블로 연결할 뿐이므로, 케이블의 배선에 필요한 스페이스도 대폭으로 삭감할 수 있습니다. 결과적으로 기존의 장치와 비교하여 제어기기의 공간을 1/3로 최소화할 전망이 있었습니다. "(H씨)
바로 H씨는 산요전기의 서포트 아래, 프로토타입기에 모션 컨트롤러「SANMOTION C S100」을 짜넣어 평가를 개시했습니다.
「EtherCAT에 대응하면서, 대폭적인 공간 절약화를 실현하고, 또한, 접착제 도포의 정확성을 유지하면서 사이클 타임을 단축할 수 있었습니다. 또, 배선 공수가 줄어들었던 것에 의한 메인터넌스 공수도 대폭 줄일 수 있었습니다. 고객으로부터도 높은 평가를 받아, 산요전기 에는 대단히 감사하고 있습니다.」(H)
(*1) 형번: SMC100의 경우. 시퀀스, 모션, 로봇 제어를 1대로 할 수 있는 디지털 입출력 내장 모션 컨트롤러 와의 비교. 2018년 10월 10일 현재 당사 조사.
(*2) Internet of things: 모든 사물을 네트워크에 연결하고 정보 교환함으로써 상호 제어하는 구조.
스테핑 모터에 대한 자세한 내용은「스테핑 모터란?
게시일:

세계 No.1을 목표로 한 물건 만들기

고급 커스터마이즈를 실현하는 기술력

곧 창업 100년

글로벌 네트워크