
กรณีศึกษา
Motion Controller ที่รองรับ EtherCAT ขนาดเล็กประหยัดพื้นที่คืออะไร
"SANMOTION C" คือ Motion Controller ขนาดกะทัดรัดที่สามารถควบคุมตำแหน่งได้อย่างแม่นยำสูง
ผู้ผลิตอุปกรณ์ความแม่นยำ บริษัท F (จำนวนพนักงาน: ประมาณ 210)



ตลาดสำหรับ "เครื่องปิดผนึก" ซึ่งเป็นอุปกรณ์การใช้งานอัตโนมัติที่ใช้ทากาวและสารปิดผนึกบนสายการผลิตอัตโนมัติ กำลังขยายตัวไปทั่วโลกเช่นกัน ขณะนี้ บริษัท F ซึ่งเป็นผู้ผลิตและจำหน่ายเครื่องปิดผนึก ได้ตัดสินใจพัฒนาเครื่องปิดผนึกรุ่นใหม่ที่เข้ากันได้กับ EtherCAT คุณ H จากแผนกพัฒนาระบบของบริษัท F ได้กล่าวไว้ดังนี้:
"เนื่องจากผู้ผลิตหลักๆ ได้นำ EtherCAT มาใช้มากขึ้น อุปกรณ์ในสายการผลิตจึงมีความเข้ากันได้กับ EtherCAT มากขึ้น เราจึงตัดสินใจมองหา Motion Controller ที่เข้ากันได้กับ EtherCAT เพื่อปรับปรุงความเข้ากันได้กับอุปกรณ์สายการผลิตอื่นๆ"
ความท้าทายอีกประการหนึ่งสำหรับอุปกรณ์ใหม่คือการทำให้มีขนาดเล็กลงและประหยัดพื้นที่มากขึ้น
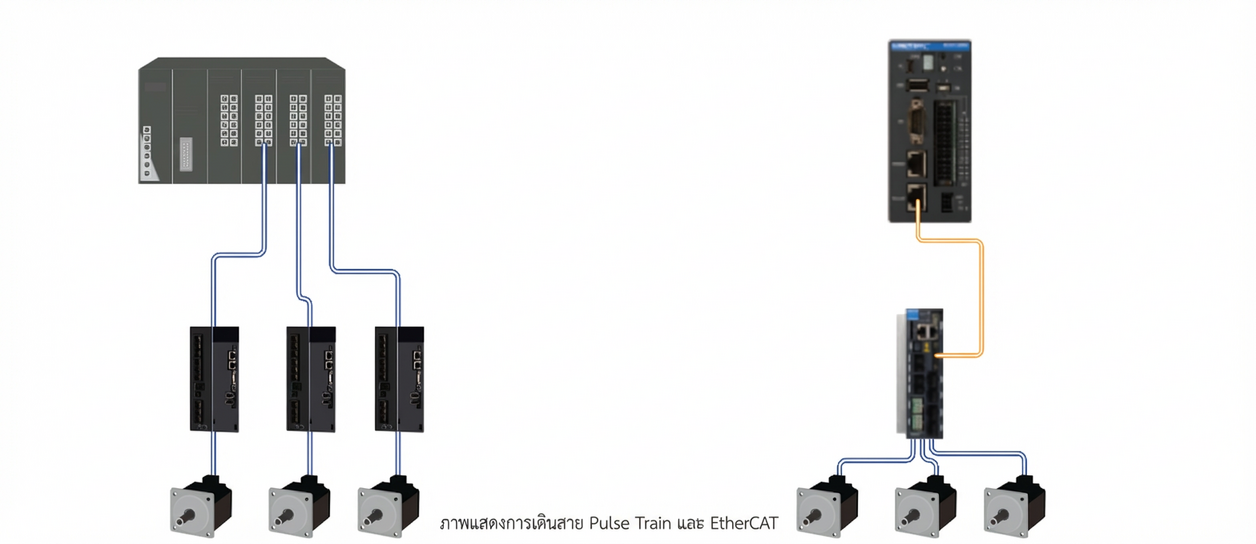
"ด้วย PLC ในปัจจุบัน แต่ละครั้งที่คุณเพิ่มหนึ่งแกนมอเตอร์ คุณจะต้องเพิ่มหน่วยพัลส์เทรนและตัวขับ เมื่อคุณเพิ่มยูนิตมากขึ้น จำนวนสายไฟจะเพิ่มขึ้น และพื้นที่บนแผงสวิตช์เพื่อวางสายไฟก็เพิ่มขึ้นเช่นกัน ` `การกำหนดค่าของอุปกรณ์เหล่านี้เป็นคอขวดในการทำให้อุปกรณ์มีขนาดเล็กลง'' (Mr. H)
ยิ่งไปกว่านั้น เพื่อปรับปรุงเวลาในการทำงาน อุปกรณ์ใหม่จะต้องทำงานได้เร็วกว่ารุ่นก่อนหน้า บทบาทของเครื่องปิดผนึกคือการทากาวในปริมาณที่กำหนดลงในบริเวณที่กำหนดอย่างมีประสิทธิภาพ วัตถุที่จะวาดไม่เพียงแต่เป็นเส้นตรงเท่านั้น แต่ยังมีเส้นโค้ง เช่น ส่วนโค้งอีกด้วย นั่นหมายความว่าจำเป็นต้องปรับตำแหน่งและความเร็วของมอเตอร์หลายตัวเพื่อสร้างวิถีที่แม่นยำ
คุณ H เริ่มมองหา Motion Controller ที่เข้ากันได้กับ EtherCAT ที่สามารถควบคุมวิถีได้ อย่างไรก็ตาม เราไม่สามารถพบ Motion Controller ที่ตรงตามความต้องการของนาย H ได้ และเราก็ไปถึงทางตัน

ในการค้นหาวิธีแก้ปัญหา คุณ H ได้ปรึกษาหารือกับตัวแทนฝ่ายขายของ SANYO DENKI CO., LTD. ซึ่งมักจะมาเยี่ยมเยียนบริษัท F ในเรื่องอื่นเป็นประจำ ตัวแทนฝ่ายขายรับฟังปัญหาปัจจุบันของลูกค้าและความต้องการของระบบอย่างละเอียด และต่อมาได้เสนอให้ใช้ Motion Controller" SANMOTION C CS100"
"Motion Controller SANMOTION C S100 รองรับโหมดควบคุมตำแหน่งแบบวนรอบของข้อกำหนด EtherCAT และสามารถดำเนินการตามวิถีได้อย่างแม่นยำสูงโดยสั่งการตำแหน่งของแต่ละแกนในรอบการสื่อสาร 2/1000 วินาที ตัวควบคุม EtherCAT ของบริษัทอื่นใช้โหมดควบคุมตำแหน่งโปรไฟล์ที่ระบุพิกัดและความเร็วของตำแหน่งเป้าหมาย ดังนั้นจึงไม่สามารถควบคุมวิถีระหว่างการกำหนดตำแหน่งได้ ด้วย SANMOTION C S100 เราสามารถคาดหวังได้ว่าจะสามารถปรับปรุงเวลาของรอบการทำงานได้ในขณะที่ยังคงความแม่นยำในการทำงานของเครื่องปิดผนึกไว้ นอกจากนี้ เนื่องจากมีฟังก์ชันเว็บเซิร์ฟเวอร์ที่สามารถตรวจสอบสถานะการทำงานและอ่านและเขียนตัวแปรโปรแกรมโดยใช้เบราว์เซอร์เอนกประสงค์บนพีซี เราจึงคิดว่าการติดตั้งระบบที่รองรับ IoT (*2) จะทำได้ง่าย" (คุณ H)
นอกจากนี้เรายังได้รับข้อเสนอในการประหยัดพื้นที่ด้วยการใช้ Motion Controller" SANMOTION C CS100" และระบบหลายแกน "มีกรณีที่พื้นที่ที่จำเป็นสำหรับอุปกรณ์ควบคุมได้รับการลดลงโดยการรวม Motion Controller ที่เล็กที่สุดในอุตสาหกรรม SANMOTION C CS100 เข้ากับ ระบบสเต็ปปิ้งมอเตอร์ ปิ้งวงปิดหลายแกน SANMOTION รุ่น PB (Closed Loop)
ในอุปกรณ์รุ่นก่อนหน้านี้ มอเตอร์สามแกนถูกควบคุมโดยไดรเวอร์สามแกน แต่ด้วยการใช้ ระบบสเต็ปปิ้งมอเตอร์ แบบวงปิดหลายแกนของ SANYO DENKI CO., LTD." SANMOTION รุ่น PB (Closed Loop)" จึงสามารถควบคุมมอเตอร์สามแกนได้ด้วยไดรเวอร์ตัวเดียว ด้วย EtherCAT สามารถเชื่อมต่ออุปกรณ์ได้ด้วยสายเคเบิลเพียงเส้นเดียว ซึ่งช่วยลดพื้นที่ที่ต้องใช้ในการเดินสายเคเบิลได้อย่างมาก ด้วยเหตุนี้จึงคาดว่าจะสามารถลดพื้นที่ที่ต้องใช้สำหรับอุปกรณ์ควบคุมลงเหลือหนึ่งในสามเมื่อเทียบกับอุปกรณ์ทั่วไปได้ (คุณ เอช)
ด้วยการสนับสนุนจาก SANYO DENKI CO., LTD. คุณ H ได้รวม Motion Controller" SANMOTION C CS100" เข้ากับต้นแบบทันทีและเริ่มประเมินผล
"ในขณะที่เราสนับสนุน EtherCAT เราก็สามารถประหยัดพื้นที่ได้อย่างมากและลดเวลาในการทำงานลงได้ในขณะที่ยังคงความแม่นยำในการติดกาวไว้ได้ นอกจากนี้ แรงงานในการเดินสายไฟที่ลดลงยังช่วยลดแรงงานในการบำรุงรักษาได้อย่างมากอีกด้วย เราได้รับคำชมเชยอย่างสูงจากลูกค้า และเราขอขอบคุณ SANYO DENKI CO., LTD. มาก" (คุณ H)
(*1) สำหรับหมายเลขรุ่น: SMC100 เมื่อเทียบกับ Motion Controller ที่มี I/O ดิจิทัลในตัวที่สามารถจัดการลำดับ การเคลื่อนไหว และการควบคุมหุ่นยนต์ในหน่วยเดียวได้ ณ วันที่ 10 ตุลาคม 2561 ตามการวิจัยของเรา
(*2) อินเทอร์เน็ตของสรรพสิ่ง: ระบบที่สรรพสิ่งทุกชนิดเชื่อมต่อกันเป็นเครือข่ายและควบคุมซึ่งกันและกันด้วยการแลกเปลี่ยนข้อมูล
สำหรับข้อมูลเพิ่มเติมเกี่ยวกับสเต็ปปิ้งมอเตอร์ โปรดดู "สเต็ปปิ้งมอเตอร์คืออะไร อธิบายกลไก ประเภท วิธีใช้งาน (วิธีการขับเคลื่อนและวิธีการควบคุม) คุณประโยชน์และคุณสมบัติต่างๆ"
วันที่วางจำหน่าย:



การผลิตมุ่งหวังเป็นที่ 1 ของโลก

ความสามารถด้านเทคนิคที่เปิดใช้งานการปรับแต่งขั้นสูง

ครบรอบ 100 ปี เร็วๆ นี้

เครือข่ายทั่วโลก

