

ความรู้
[ประเภทและคุณสมบัติ] สเต็ปปิ้งมอเตอร์คืออะไร กลไกและประเภท



สเต็ปปิ้งมอเตอร์เป็นมอเตอร์ควบคุมชนิดหนึ่งที่เคลื่อนที่และหมุนโดยเพิ่มมุมคงที่เหมือนนาฬิกาโดยการสลับเฟสที่กระแสไหลผ่าน การวางตำแหน่งสามารถทำได้โดยไม่ต้องใช้เซ็นเซอร์ บางครั้งเรียกว่าพัลส์มอเตอร์, สเต็ปมอเตอร์, สเต็ปเปอร์มอเตอร์ ฯลฯ
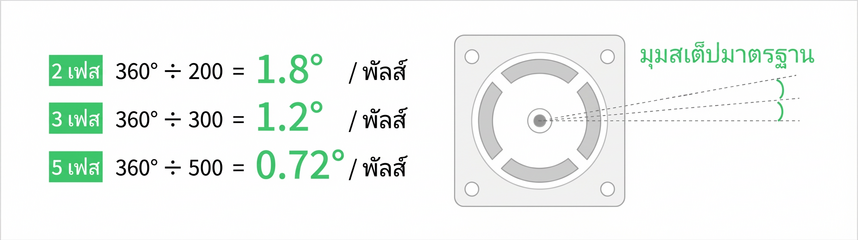
สเต็ปปิ้งมอเตอร์แบ่งออกเป็น 2 เฟส 3 เฟส และ 5 เฟส ขึ้นอยู่กับโครงสร้างของสเต็ปปิ้งมอเตอร์
สำหรับสเต็ปปิ้งมอเตอร์ที่หมุนเหมือนนาฬิกา มุมที่สามารถเคลื่อนที่ได้ด้วยพัลส์เดียวเรียกว่า "มุมสเต็ปมาตรฐาน" ยิ่งมุมขั้นอ้างอิงละเอียดมากเท่าใด การเคลื่อนไหวก็จะราบรื่นและแม่นยำยิ่งขึ้นเท่านั้น

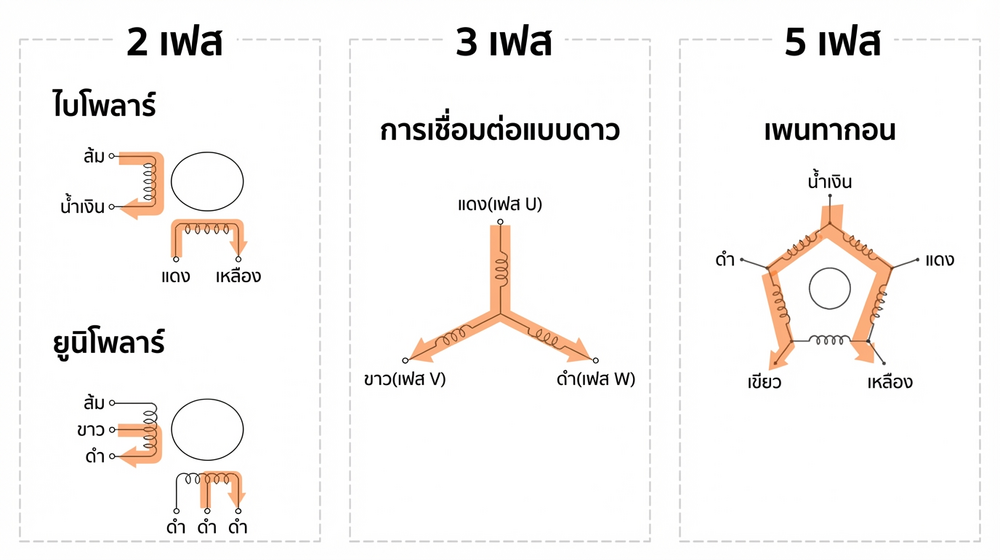
จำเป็นต้องมีคนขับในการขับเคลื่อนสเต็ปปิ้งมอเตอร์ เมื่อสร้างไดรเวอร์ โปรดทราบว่าในกรณีของไฟสองเฟส วงจรไดรฟ์ของไดรเวอร์จะแตกต่างกัน ขึ้นอยู่กับว่าเป็นไดรฟ์แบบไบโพลาร์หรือแบบยูนิโพลาร์ 3 เฟส และ 5 เฟส ต้องใช้ตัวขับที่สามารถไหลกระแสได้ทั้งสองทิศทาง
นอกจากนี้ สเต็ปปิ้งมอเตอร์แบบ 2 เฟสและ 3 เฟสยังมีโครงสร้างการพันขดลวดที่เรียบง่าย ดังนั้นแม้ว่ามอเตอร์จะผลิตโดยผู้ผลิตที่แตกต่างกัน ก็สามารถหมุนได้ด้วยวงจรขับเคลื่อนเดียวกัน อย่างไรก็ตาม ในกรณีของสเต็ปปิ้งมอเตอร์ 5 เฟส โครงสร้างขดลวดมีความซับซ้อน และการรวมกันและลำดับของเฟสที่ไหลเพื่อหมุนมอเตอร์จะแตกต่างกัน ดังนั้นในกรณีของสเต็ปปิ้งมอเตอร์ 5 เฟส จะต้องระมัดระวังในการเลือกไดรเวอร์ที่จะนำมารวมกัน
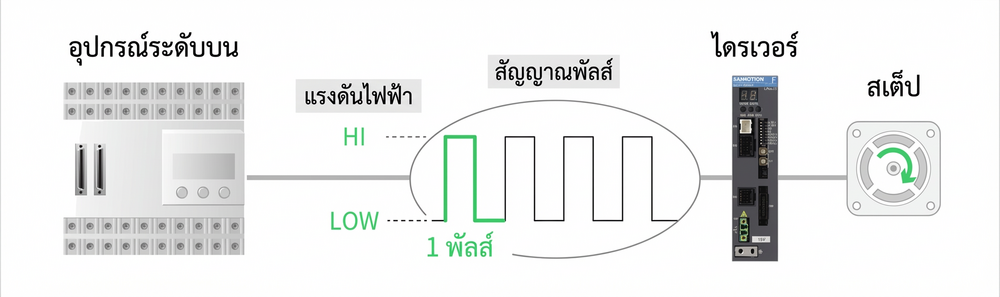
ประการแรก เกี่ยวกับสัญญาณคำสั่งพัลส์ นี่คือสัญญาณไฟฟ้าที่เปิด/ปิดแรงดันไฟฟ้าซ้ำๆ (สูง/ต่ำ) หนึ่งรอบของ HI/LOW นับเป็นหนึ่งพัลส์
สัญญาณพัลส์จะถูกป้อนไปยังไดรเวอร์จากโฮสต์คอนโทรลเลอร์ ฯลฯ และมุมการหมุนจะถูกควบคุมโดยจำนวนสัญญาณพัลส์
การควบคุมความเร็วของสเต็ปปิ้งมอเตอร์
ความเร็วในการหมุนจะถูกควบคุมโดยความหนาแน่นของจำนวนพัลส์ หากพัลส์หนึ่งหมุนมุมขั้นตอนอ้างอิงหนึ่งมุม การส่งพัลส์ 10 ครั้งต่อวินาทีจะส่งผลให้มุมการหมุนต่อวินาทีมีขนาดใหญ่กว่าการส่งหนึ่งพัลส์ต่อวินาที ดังนั้น ยิ่งความถี่พัลส์สูง ความเร็วการหมุนก็จะยิ่งเร็วขึ้น
การควบคุมตำแหน่งสเต็ปปิ้งมอเตอร์
ไดรเวอร์ล่าสุดได้เริ่มใช้วิธีไมโครสเต็ป ซึ่งช่วยให้สามารถควบคุมปริมาณกระแสที่ไหลผ่านเฟสได้ละเอียดยิ่งขึ้น และการวางตำแหน่งในมุมที่เล็กกว่ามุมสเต็ปมาตรฐานของมอเตอร์ ช่วยให้ควบคุมตำแหน่งได้แม่นยำยิ่งขึ้น
ข้อได้เปรียบ 1: ง่ายต่อการควบคุม
สามารถเปิดปิดได้อย่างง่ายดายเพียงเปิดและปิดทรานซิสเตอร์ของไดรเวอร์อย่างถูกต้อง นอกจากนี้ยังสามารถเพิ่มความเร็วในการหมุนได้อย่างง่ายดายเพียงเพิ่มความเร็วในการเปิด/ปิด
ข้อได้เปรียบ 2: สามารถลดความซับซ้อนของระบบได้
สามารถควบคุมมอเตอร์ได้อย่างง่ายดายโดยใช้พัลส์และความถี่อินพุตไปยังไดรเวอร์ ดังนั้นจึงไม่จำเป็นต้องใช้ตัวควบคุมที่ซับซ้อน นอกจากนี้ คุณลักษณะที่สำคัญที่สุดของสเต็ปปิ้งมอเตอร์คือสามารถควบคุมตำแหน่งและความเร็วได้โดยไม่ต้องใช้เครื่องตรวจจับ ทำให้ระบบง่ายขึ้น
ข้อได้เปรียบ 3: สร้างระบบราคาถูกได้
ไดรเวอร์นั้นเรียบง่ายและไม่ต้องใช้เครื่องตรวจจับ และระบบสามารถสร้างได้ด้วยต้นทุนที่ต่ำเนื่องจากไม่ต้องใช้ตัวควบคุมที่ซับซ้อน
ข้อได้เปรียบ 4: สามารถหยุดได้อย่างมั่นคง
สเต็ปปิ้งมอเตอร์เป็นมอเตอร์ที่ใช้แรงแม่เหล็กในการหยุดมอเตอร์ ดังนั้นจึงสร้างแรงหยุด (แรงบิดที่คงอยู่) ซึ่งช่วยให้หยุดได้อย่างมั่นคง
แม้ว่าเราจะไม่เห็นสเต็ปปิ้งมอเตอร์ในชีวิตประจำวันของเราโดยตรง แต่สเต็ปปิ้งมอเตอร์ก็สามารถใช้ได้กับเครื่องจักรจำนวนมากที่ช่วยสนับสนุนชีวิตของเราในสถานการณ์ต่างๆ ใช้จริงที่ไหน? ตัวอย่างทั่วไปคือการใช้งานต่อไปนี้
สำหรับข้อมูลเพิ่มเติม โปรดตรวจสอบ "สเต็ปปิ้งมอเตอร์คืออะไร การใช้งานและตัวอย่างการใช้งานของสเต็ปปิ้งมอเตอร์"
ข้อควรระวัง 1: คุณจะหลุดออกจากขั้นตอน
ไม่จำเป็นต้องใช้เซ็นเซอร์ แต่เนื่องจากตำแหน่งไม่ได้ถูกตรวจสอบ คุณจะไม่สังเกตเห็นว่าเซ็นเซอร์ไม่เคลื่อนที่ตามคำสั่ง (ก้าวออกไป) เมื่อเทียบกับเซอร์โวมอเตอร์ที่ควบคุมในวงปิด พวกมันมีความน่าเชื่อถือน้อยกว่า
ข้อควรระวัง 2: มีไข้สูง
แรงบิดในการยึดเกาะจะเกิดขึ้นแม้ในขณะที่หยุด ซึ่งทำให้เกิดความร้อน
ข้อควรระวัง 3: การสั่นสะเทือน
มอเตอร์ที่หมุนด้วยมุมคงที่เพิ่มขึ้นจะสั่นเสมอขณะเคลื่อนที่ ครั้งละหนึ่งขั้น เหมือนกับการขึ้นลงบันได
| สเต็ปเปอร์มอเตอร์ | เซอร์โวมอเตอร์ | |||
| ควบคุม | วงเปิด | วงปิด | ||
| แรงบิด | ไม่มีเครื่องตรวจจับ | จะสร้างแรงบิดคงที่ในทิศทางที่หยุดมอเตอร์เสมอ | เครื่องตรวจจับกระแสมอเตอร์ | ควบคุมกระแสมอเตอร์ในทิศทางที่หมุนมอเตอร์เพื่อสร้างแรงบิดตามคำสั่ง |
| ความเร็วในการหมุน | ไม่มีเครื่องตรวจจับ | หมุนด้วยความเร็วที่ซิงโครไนซ์กับความถี่พัลส์อินพุต หากคุณไม่สามารถซิงโครไนซ์ได้ คุณจะไม่ได้รับการปรับแต่ง | เครื่องตรวจจับความเร็วมอเตอร์ | เคลื่อนที่ขณะตรวจสอบความเร็วของมอเตอร์เพื่อให้มอเตอร์หมุนตามความเร็วที่สั่ง |
| ตำแหน่ง (มุม) | ไม่มีเครื่องตรวจจับ | เคลื่อนที่ตามจำนวนพัลส์อินพุต หากไม่ก้าวทันก็จะหลุดก้าว | เครื่องตรวจจับตำแหน่งมอเตอร์ | เคลื่อนที่ขณะตรวจสอบตำแหน่งมอเตอร์เพื่อไปยังตำแหน่งเป้าหมายที่ได้รับคำสั่ง |
| คุณสมบัติ | ราคาถูกและใช้งานง่าย ความเร็วต่ำ และแรงบิดสูง | แม้จะมีราคาแพง แต่ก็มีฟังก์ชั่นหลากหลายและมีแรงบิดสูงจนถึงความเร็วสูง | ||
| แรงเสียดทาน | แม้จะมีแรงเสียดทานสูง การวางตำแหน่งที่รวดเร็วและแม่นยำก็เป็นไปได้ | การวางตำแหน่งที่แม่นยำสามารถทำได้ แต่ต้องใช้เวลาหากแรงเสียดทานมีขนาดใหญ่ | ||
| เสียงสะท้อน/การสั่นสะเทือน | ระลอกความเร็วมีขนาดใหญ่และมอเตอร์ไม่สามารถระงับเสียงสะท้อนได้ | ความเร็วระลอกคลื่นและเสียงสะท้อนสามารถระงับได้โดยใช้ฟังก์ชันไดรเวอร์ | ||
| อัตราส่วนความเฉื่อย | หากความเฉื่อยมีขนาดใหญ่ มอเตอร์จะไม่สามารถควบคุมได้ | สามารถควบคุมมอเตอร์ได้แม้ว่าอัตราส่วนความเฉื่อยจะมากก็ตาม | ||
| สิ่งที่ฉันเก่ง การใช้งานที่เหมาะสม |
คงตำแหน่งเดิมไว้ | ให้หมุนได้อย่างมั่นคง (ไม่มีการสั่นสะเทือนหรือเสียงรบกวน) | ||
| ความเร็วต่ำ การดำเนินการเริ่ม/หยุดระยะสั้น | การเริ่มและหยุดการดำเนินการด้วยความเร็วสูงและเร่งความเร็วสูง | |||
| การทำงานของเครื่องจักรเบา | การตัดเฉือนที่แม่นยำ การตัดเฉือนหนัก | |||
วันที่วางจำหน่าย:



การผลิตมุ่งหวังเป็นที่ 1 ของโลก

ความสามารถด้านเทคนิคที่เปิดใช้งานการปรับแต่งขั้นสูง

ครบรอบ 100 ปี เร็วๆ นี้

เครือข่ายทั่วโลก

