กรณีศึกษา
ข้อเสนอสำหรับเวชศาสตร์ฟื้นฟู - ฉันต้องการสร้างหุ่นยนต์ปิเปตที่ควบคุมจากระยะไกล
ความรู้ความชำนาญและธุรกิจร่วมสร้างสรรค์ของ SANYO DENKI CO., LTD. ที่สนับสนุนโครงการนี้
อุตสาหกรรมก่อสร้าง (จำนวนพนักงาน: 8,500)



|
บริษัท ไทเซคอนสตรัคชั่น จำกัด เนื้อหาทางธุรกิจ วิศวกรรมโยธาก่อสร้าง URL
|
|
ซอฟท์แบงก์ คอร์ปอเรชั่น เนื้อหาทางธุรกิจ บริการสื่อสาร URL
|
Taisei Corporation ซึ่งเป็นผู้รับเหมาทั่วไปรายใหญ่ ได้เปิดตัวโครงการพัฒนาเทคโนโลยีใหม่และได้เริ่มพัฒนาแนวคิดใหม่ ``ระบบควบคุมระยะไกล'' ที่มุ่งเป้าไปที่ ``การประหยัดแรงงานในโรงงานผลิต (โรงงานยาและอาหาร ฯลฯ)''
ส่วนหนึ่งของความพยายามนี้ Taisei Corporation ร่วมมือกับ SoftBank ได้เริ่มพัฒนาและสาธิตการทดลองระบบที่ควบคุมหุ่นยนต์ปิเปตเพาะเซลล์จากระยะไกลโดยใช้ 5G
งานปิเปตเกี่ยวข้องกับการดูด การจ่าย และการวัดปริมาณของเหลวเพียงเล็กน้อย และจำเป็นต้องหลีกเลี่ยงไม่ให้เซลล์เสียหาย ดังนั้นการควบคุมระยะไกลจึงต้องอาศัยการเคลื่อนไหวที่แม่นยำโดยไม่ชักช้าจากแขนหุ่นยนต์ อย่างไรก็ตาม เนื่องจากนี่เป็นความพยายามที่ไม่เคยเกิดขึ้นมาก่อน จึงมีอุปสรรคทางเทคนิคมากมาย
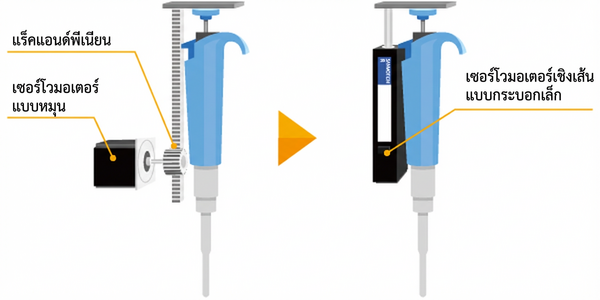
ประการแรก เพื่อที่จะส่งการกระทำของผู้ปฏิบัติงานไปยังหุ่นยนต์ระยะไกล จำเป็นต้องได้รับข้อมูลตำแหน่งของผู้ปฏิบัติงานอย่างถูกต้อง นอกจากนี้ เนื่องจากเริ่มแรกพิจารณาเซอร์โวมอเตอร์แบบหมุนสำหรับมือหุ่นยนต์ระยะไกล จึงจำเป็นต้องมีกลไกแร็คแอนด์พิเนียนเพื่อแปลงการเคลื่อนที่แบบหมุนให้เป็นการเคลื่อนที่เชิงเส้น อย่างไรก็ตาม สิ่งนี้จะต้องมีอุปกรณ์ที่ใหญ่กว่า ดังนั้นจึงจำเป็นต้องมีการปรับปรุง นอกจากนี้ เนื่องจากต้องไม่มีความล่าช้าระหว่างการทำงานของผู้ปฏิบัติงานกับรีโมท จึงจำเป็นต้องรักษาความล่าช้าให้อยู่ภายในช่วง (ภายใน 0.2 วินาที) ที่บุคคลจะไม่สังเกตเห็น
![[ฝั่งปฏิบัติการ (โตเกียว)]](/jp/img/case/case_img_121_capture_1.jpg)
[ฝั่งปฏิบัติการ (โตเกียว)]
![[ด้านการติดตั้งอุปกรณ์เพาะเลี้ยงเซลล์ (โอซาก้า)]](/jp/img/case/case_img_121_capture_2.jpg)
[ด้านการติดตั้งอุปกรณ์เพาะเลี้ยงเซลล์ (โอซาก้า)]
เอื้อเฟื้อภาพโดย: Taisei Corporation
เพื่อแก้ไขปัญหาเหล่านี้ SANYO DENKI CO., LTD. จึงได้สร้างระบบรองรับในฐานะผู้ผลิตมอเตอร์เซอร์โวและเสนอโซลูชั่นต่างๆ ขึ้นมาโดยอาศัยความรู้ที่สะสมไว้ในระบบ FA

ประสบความสำเร็จในการดำเนินการปิเปตระยะไกลโดยใช้ 5G เพื่อให้บรรลุความพยายามที่ไม่เคยเกิดขึ้นมาก่อนนี้ SoftBank ซึ่งกำลังสร้างเครือข่าย 5G ร่วมกับ Taisei Corporation ติดต่อ SANYO DENKI CO., LTD. รวมถึง Nichiryo ซึ่งเป็นผู้ผลิตอุปกรณ์ทางการแพทย์และวิทยาศาสตร์ และ Matsuura Denkosha ซึ่งเป็นบริษัทควบคุมไฟฟ้า เพื่อนำเทคโนโลยีของแต่ละบริษัทมารวมกันและพัฒนาหุ่นยนต์ต่อไป
เพื่อแก้ไขปัญหาการรับข้อมูลตำแหน่งจากผู้ปฏิบัติงาน SANYO DENKI CO., LTD. ได้จัดหาตัวเข้ารหัสและความรู้ความชำนาญในการติดตั้งให้กับ Nichiryo ซึ่งเป็นผู้ผลิตปิเปตเป็นครั้งแรก
ต่อไป เราเสนอให้เปลี่ยนเซอร์โวมอเตอร์โรตารีที่กำลังพิจารณาสำหรับการขับเคลื่อนแขนด้านระยะไกลด้วยเซอร์โวมอเตอร์เชิงเส้นทรงกระบอกขนาดเล็ก แม้ว่าเซอร์โวมอเตอร์เชิงเส้นนี้มีความกว้าง 12 มม. แต่ก็สร้างแรงขับขนาดใหญ่ด้วยแรงขับพิกัด 5.1 N ซึ่งเพียงพอที่จะตอบสนองแรงบิดที่ต้องการ (แรงในการดันสปริงปิเปต) นอกจากนี้ยังมีตัวเข้ารหัสเชิงเส้นในตัว (ส่วนเพิ่มด้วยแสง) และลิเนียร์ไกด์ ทำให้สามารถกำจัดกลไกแร็คแอนด์พีเนียนได้อย่างสมบูรณ์ ข้อเสนอนี้ทำให้กลไกด้านข้างระยะไกลเรียบง่ายและบาง
นอกจากนี้เรายังเสนอการสื่อสารความเร็วสูงโดยใช้ EtherCAT เพื่อลดความล่าช้าระหว่างฝ่ายปฏิบัติการและฝ่ายระยะไกล ผลที่ได้คือ เราประสบความสำเร็จในการส่งงานของผู้ปฏิบัติงานผ่านแอมพลิฟายเออร์ DC48 EtherCAT R ไปยังมอเตอร์เชิงเส้นตรงแบบทรงกระบอกระยะไกลได้อย่างแม่นยำและไม่มีการหน่วงเวลาที่เห็นได้ชัดเจน (0.03 วินาที)
นอกจากนี้ เรายังประสบความสำเร็จในการวัดปริมาณการทำงานด้วยตนเองเมื่อตรวจสอบการทำงานของปิเปตอีกด้วย สิ่งนี้นำไปสู่ความเป็นไปได้ในการสร้างสรรค์นวัตกรรมเพิ่มเติม เช่น การเรียนรู้ของ AI
ด้วยวิธีนี้ บริษัทต่างๆ หลายแห่งจึงมารวมตัวกันภายใต้โครงการ Taisei Corporation และ SoftBank เพื่อแก้ไขปัญหาทางเทคนิคต่างๆ
ในเดือนมีนาคม พ.ศ. 2564 บริษัท Taisei Corporation และ SoftBank ดำเนินการสาธิตการควบคุมระยะไกลโดยใช้ 5G และจอภาพ 4K ระหว่างโตเกียวและโอซากะ เราสามารถดำเนินการปิเปตระยะไกลได้สำเร็จ ถือได้ว่าความสำเร็จของการทดลองอันซับซ้อนนี้เกิดจากความสัมพันธ์เชิงสร้างสรรค์ร่วมกันที่บริษัทต่างๆ สามารถสร้างขึ้นได้
SANYO DENKI CO., LTD. จะยังคงมีส่วนสนับสนุนในการสร้างธุรกิจใหม่ๆ โดยใช้ประโยชน์จากความรู้ที่สะสมมาในการสร้างระบบ FA
บทความที่ตีพิมพ์ใน Taisei Corporation มีอะไรใหม่
ประสบความสำเร็จในการควบคุมงานปิเปตเพาะเลี้ยงเซลล์จากระยะไกลโดยใช้ 5G และแขนหุ่นยนต์ |. 2021 |. Taisei Corporation (taisei.co.jp)
บทความที่เผยแพร่ในข้อมูลบริษัทของเรา
เซอร์โวมอเตอร์เชิงเส้นทรงกระบอกขนาดเล็กของเราถูกนำมาใช้โดย "ระบบควบคุมระยะไกลการทำงานของปิเปตสำหรับการเพาะเลี้ยงเซลล์" ของบริษัท Taisei Corporation
วันที่วางจำหน่าย:



การผลิตมุ่งหวังเป็นที่ 1 ของโลก

ความสามารถด้านเทคนิคที่เปิดใช้งานการปรับแต่งขั้นสูง

ครบรอบ 100 ปี เร็วๆ นี้

เครือข่ายทั่วโลก