解决案例
是否有小型且节省空间、支持 EtherCAT 的运动控制器?
实现高精度定位控制的紧凑型运动控制器 “SANMOTION C S100”
精密机械设备制造商F公司(员工数:约210名)
正在寻找解決方案的 H先生,与因另一项目定期拜访 F公司的山洋电气的营业担当商谈了这些课题。营业担当详细了解了当前课题及系统要求,几天后,提出了使用运动控制器“SANMOTION C S100”的方案。
“据介绍,运动控制器‘SANMOTION C S100’支持 EtherCAT 规格的周期位置控制模式,能以 2/1000 秒单位的通信周期发出指令控制各轴的位置,实现高精度的轨迹动作。其他公司的 EtherCAT 控制器,由于采用指定目标位置的坐标及速度的轮廓位置控制模式,不能控制定位途中的轨迹。若使用‘SANMOTION C S100’,则可保持涂胶机的动作精度,又能缩短循环时间。并且具备Web服务器功能,可通过 PC 机的通用浏览器监控动作情况及读写程序变量,因此便于应用到支持 IoT(*2) 的系统。”(H先生)
还收到了使用运动控制器“SANMOTION C S100”与多轴系统的节省空间化的提案。
“听说有将业界最小的运动控制器‘SANMOTION C S100’与多轴闭环步进系统‘SANMOTION Model No.PB’组合使用,使控制设备的空间实现最小化的事例。
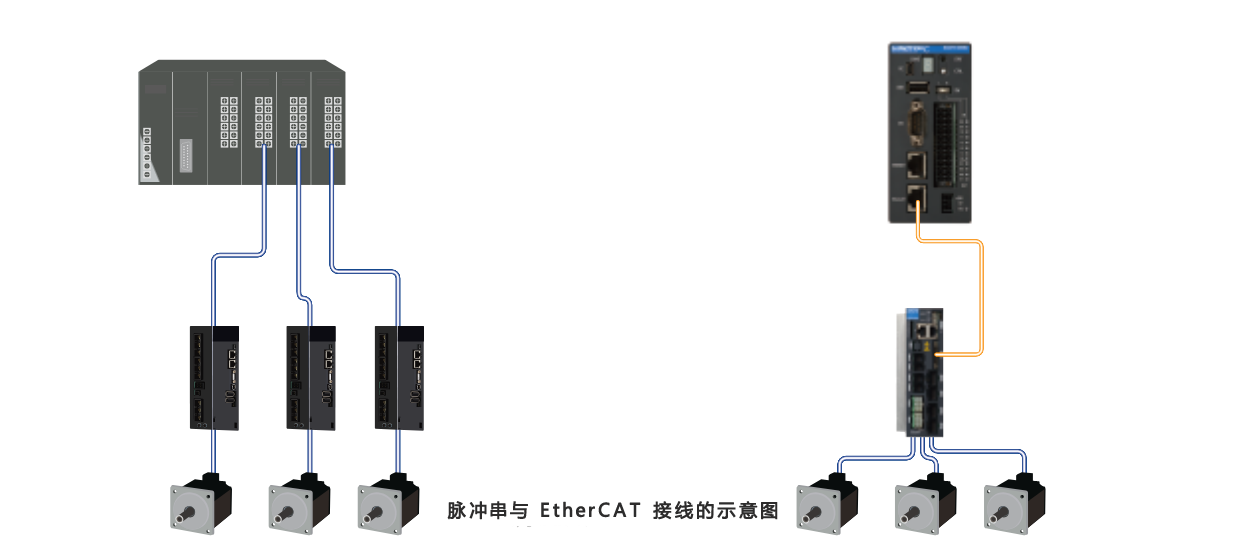
之前的设备,用3台驱动器控制3台电机。若使用山洋电气的多轴闭环步进系统‘SANMOTION Model No.PB’,则可用一台驱动器控制3台电机。通过 EtherCAT 来连接各设备,只需使用一根电缆,可大幅缩减电缆接线所需的空间。结果是,与原来的设备相比,控制设备的空间缩减为原来的 1/3 ,实现最小化。”(H先生)
H先生在山洋电气的支援下,立即将运动控制器“SANMOTION C S100 ”组装到试作样机上,开始测评。
“既支持EtherCAT,又大幅缩减了所需空间,而且保持粘合剂涂布的准确性同时,还缩短了循环时间。此外,接线工时减少,维护工时大幅降低。客户给予了很高的评价,非常感谢山洋电气。”(H先生)
(*1) 型号:SMC100。与可用一台实现时序、动作、机器人控制的数字输入输出内置运动控制器相比较。截止至 2018年10月10日,我司调查。
(*2)Internet of things:用网络将所有设备连接,进行信息交换及相互控制的系统。


