
解决案例
市面上销售的机器人无法优化公司内的生产线・・・
实现了7轴多关节的机器人内制化的运动控制器「SANMOTION C」是指
机械零部件制造商A公司(员工人数:约2,000名)
机械零部件制造商A公司在日本国内和海外的自有工厂,通过引进机器人实现了省人化、并提高了效率,但收效甚微。该公司生产技术部B部长这样说道。
「由于外包开发机器人的成本太高,因此我们引进了市售的机器人,但由于臂长和精细动作不能很好的吻合,总是无法优化我们公司生产线。结果,很多工序都需要依赖于人的手。我们公司在海外也有工厂,但海外的人工成本也在上涨。即使为了控制人工成本也迫切需要开发优化我们公司生产线的机器人。」
经过反复试验,B先生想要内部制造最适合生产线的机器人,但无法顺利将计划付诸实施。
「为了仅通过机器人实现人类迄今完成的细致的作业和流程,我们得出的理想结论是,最好在内部制造出比普通机器人关节更多的7轴多关节机器人。与一般的6轴多关节机器人相比,7轴多关节机器人具有能够实现接近人的动作的优点。可遗憾的是,公司内部缺乏开发机器人的技术和专业知识。此外,还存在找不到可以控制多达7个轴的控制器的问题。尽管如此,本公司为了积累面向未来的技术,无论如何都希望能够成功实现机器人的内部制造。」(B先生)
B先生没有放弃机器人的内部制造,继续收集信息。
B先生向之前购买冷却风扇时联络的山洋电气担当人员咨询了这些问题。担当人员在听取A公司的课题后,提案了能够控制7轴多关节机器人的运动控制器「SANMOTION C S500系列」。
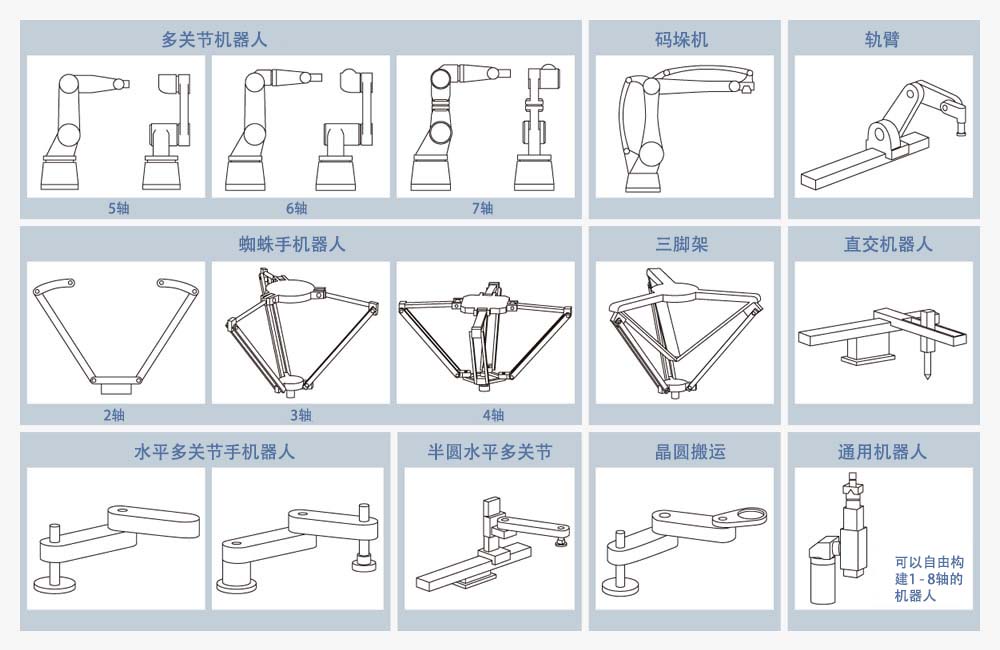
「在听到直角坐标机器人、并联机器人、蜘蛛手机器人等的动作模型都是预先设定的,所以不需要复杂的输入就能在短时间内编写程序的说明后,便有了实现内部制造机器人的期待。」(B先生)
可控制的机器人形状有15种。可以轻松实现各种机器人的轨迹控制和插补操作。
通过设计同行的多次演示和技术说明,A公司决定正式采用「SANMOTION C」,B先生等开发人员开始制作使用山洋电气伺服系统的机器人。A公司之所以能够顺利决定采用,源于对山洋电气技术支持体制的信任。
B先生等人的机器人开发,在山洋电气的技术支持下顺利开展。
「虽然本公司一开始为没有专业知识而着急,但是在设计关节轴等方面得到了山洋电气的大力支持,真是帮了大忙。不仅机器人顺利完成,也成功实现了臂长和动作等与本公司的生产线的完美匹配。」(B先生)
A公司将完成的机器人组装到各工厂的生产线,实现了预期的省人化、高效化。B先生说,机器人的内制化在提高效率的同时,在技术和专业知识的积累方面具有重要意义。
「由于生产技术负责人员掌握了技能,使得其他用途中应用伺服系统也成为可能,可以进一步考虑推进省人化和高效化。此外,最近访问我们工厂的客户对机器人内部制造的技术能力表示了赞扬。我认为技术人员的无上荣幸莫过于此。」(B先生)
B先生的挑战带来了各种附加效果。


