

Wissen
[Typen und Funktionen] Was ist ein Schrittmotor? Mechanismus und Typen



Ein Schrittmotor ist eine Art Steuermotor, der sich wie eine Uhr in festen Winkelschritten bewegt und dreht, indem er die Phase, durch die Strom fließt, umschaltet. Die Positionierung kann ohne Sensor erfolgen. Er wird manchmal auch als Impulsmotor, Schrittmotor, Schrittmotor usw. bezeichnet.
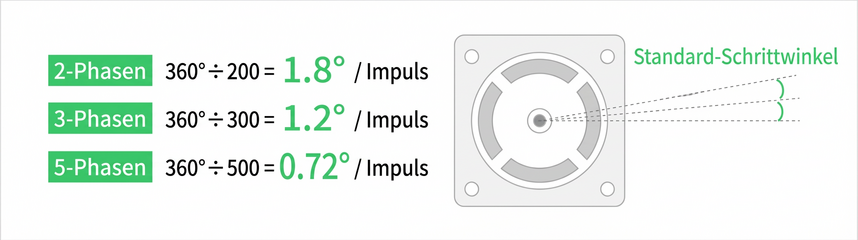
Schrittmotoren werden je nach Aufbau in 2-Phasen-, 3-Phasen- und 5-Phasen-Schrittmotoren eingeteilt.
Bei einem Schrittmotor, der sich wie eine Uhr dreht, wird der Winkel, der mit einem Impuls bewegt werden kann, als „Standardschrittwinkel“ bezeichnet. Je feiner der Referenzschrittwinkel ist, desto sanfter und präziser ist die Bewegung.

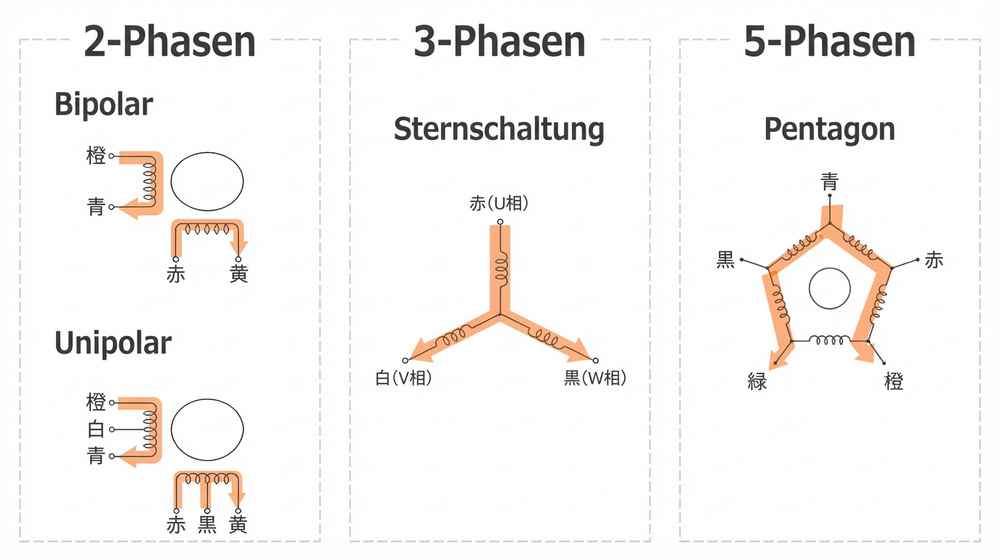
Zum Antreiben eines Schrittmotors ist ein Treiber erforderlich. Bitte beachten Sie beim Erstellen eines Treibers, dass im Fall von Zweiphasenantrieb die Treiberschaltung des Treibers unterschiedlich ist, je nachdem, ob es sich um einen bipolaren Antrieb oder einen unipolaren Antrieb handelt. 3-Phasen und 5-Phasen erfordern einen Treiber, der Strom in beide Richtungen fließen lassen kann.
Darüber hinaus verfügen 2-Phasen- und 3-Phasen-Schrittmotoren über einfache Wicklungsstrukturen, sodass sie auch dann von der gleichen Antriebsschaltung angetrieben werden können, wenn die Motoren von unterschiedlichen Herstellern stammen. Bei einem 5-Phasen-Schrittmotor ist die Wicklungsstruktur jedoch komplex und es gibt keine einheitliche Kombination oder Reihenfolge der Phasen, die zum Drehen des Motors durchlaufen werden. Daher muss bei einem 5-Phasen-Schrittmotor auf die Wahl des zu kombinierenden Treibers geachtet werden.
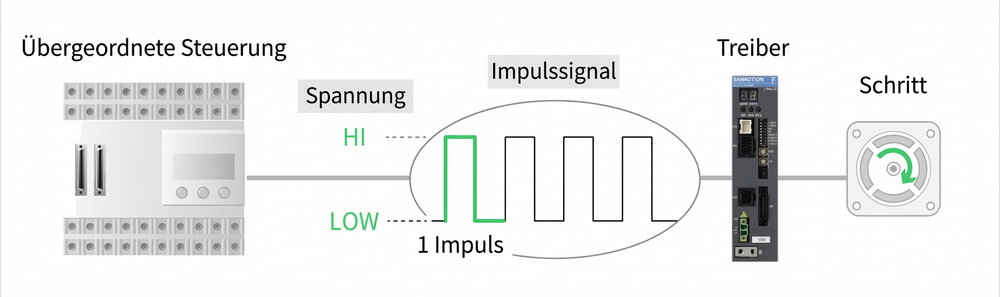
Was zunächst das Impulsbefehlssignal betrifft, handelt es sich dabei um ein elektrisches Signal, das die Spannung wiederholt EIN/AUS (HI/LOW) schaltet. Ein Zyklus von HI/LOW wird als ein Impuls gezählt.
Impulssignale werden von einem Host-Controller usw. in den Treiber eingegeben, und der Drehwinkel wird durch die Anzahl der Impulssignale gesteuert.
Schrittmotor-Geschwindigkeitsregelung
Die Rotationsgeschwindigkeit wird durch die Dichte der Impulszahl gesteuert. Wenn ein Impuls einen Referenzschrittwinkel dreht, führt das Senden von 10 Impulsen pro Sekunde zu einem größeren Drehwinkel pro Sekunde als das Senden eines Impulses pro Sekunde. Je höher die Pulsfrequenz, desto schneller die Rotationsgeschwindigkeit.
Schrittmotor-Positionssteuerung
Neue Treiber haben damit begonnen, die Mikroschrittmethode zu übernehmen, die eine feinere Steuerung der durch die Phasen fließenden Strommenge und eine Positionierung in einem Winkel ermöglicht, der kleiner als der Standardschrittwinkel des Motors ist, was eine präzisere Positionssteuerung ermöglicht.
Vorteil 1: Einfache Kontrolle
Es lässt sich leicht einschalten, indem man einfach den Transistor des Treibers richtig ein- und ausschaltet. Die Rotationsgeschwindigkeit lässt sich auch einfach erhöhen, indem man einfach den EIN/AUS-Zeitpunkt beschleunigt.
Vorteil 2: Systemvereinfachung möglich
Der Motor kann einfach über die Impuls- und Frequenzeingabe an den Treiber gesteuert werden, sodass keine komplizierte Steuerung erforderlich ist. Darüber hinaus besteht das wichtigste Merkmal von Schrittmotoren darin, dass Position und Geschwindigkeit ohne Detektor gesteuert werden können, was eine Vereinfachung des Systems ermöglicht.
Vorteil 3: Kostengünstiger Systemaufbau möglich
Der Treiber ist einfach und erfordert keinen Detektor, und das System kann kostengünstig aufgebaut werden, da keine komplizierte Steuerung erforderlich ist.
Vorteil 4: Stabiler Halt möglich
Ein Schrittmotor ist ein Motor, der Magnetkraft zum Stoppen des Motors nutzt und so eine Haltekraft (Haltemoment) erzeugt, die einen stabilen Halt ermöglicht.
Obwohl Schrittmotoren in unserem täglichen Leben nicht direkt zu sehen sind, funktionieren sie in vielen Maschinen, die unser Leben in den unterschiedlichsten Situationen unterstützen. Wo wird es eigentlich verwendet? Typische Beispiele sind die folgenden Verwendungen.
Weitere Informationen finden Sie unter „Was ist ein Schrittmotor? Anwendungen und Anwendungsbeispiele von Schrittmotoren.“
Vorsicht 1: Sie geraten aus dem Tritt
Ein Sensor ist nicht erforderlich, aber da die Position nicht überprüft wird, fällt es Ihnen nicht auf, wenn er sich nicht entsprechend den Befehlen bewegt (austritt). Im Vergleich zu Servomotoren, die in einem geschlossenen Regelkreis gesteuert werden, sind sie weniger zuverlässig.
Achtung 2: Hohes Fieber
Auch im Stillstand entsteht ein Haltemoment, wodurch Wärme entsteht.
Achtung 3: Vibration
Ein Motor, der sich in festen Winkelschritten dreht, vibriert immer, wenn er sich Schritt für Schritt bewegt, als würde er eine Treppe hinauf- und hinuntergehen.
| Schrittmotor | Servomotor | |||
| Kontrolle | offene Schleife | geschlossener Kreislauf | ||
| Drehmoment | Kein Detektor | Erzeugt immer ein konstantes Drehmoment in der Richtung, die den Motor stoppt. | Motorstromdetektor | Steuert den Motorstrom in die Richtung, in die sich der Motor dreht, um das befohlene Drehmoment zu erzeugen. |
| Rotationsgeschwindigkeit | Kein Detektor | Rotiert mit einer Geschwindigkeit, die mit der Eingangsimpulsfrequenz synchronisiert ist. Wenn Sie nicht synchronisieren können, geraten Sie aus dem Takt. | Motorgeschwindigkeitsdetektor | Bewegen Sie sich und prüfen Sie dabei die Motorgeschwindigkeit, sodass der Motor mit der befohlenen Geschwindigkeit dreht. |
| Position (Winkel) | Kein Detektor | Bewegen Sie sich um den Betrag des Eingangsimpulses. Wer sich nicht rechtzeitig bewegt, gerät aus dem Takt. | Motorpositionsdetektor | Bewegen Sie sich und überprüfen Sie dabei die Motorposition, um die befohlene Zielposition zu erreichen. |
| Merkmale | Günstig und einfach zu bedienen, niedrige Drehzahl und hohes Drehmoment | Obwohl teuer, verfügt es über verschiedene Funktionen und ein hohes Drehmoment bis hin zu hoher Drehzahl. | ||
| Reibung | Selbst bei großer Reibung ist eine schnelle und genaue Positionierung möglich. | Eine präzise Positionierung ist möglich, bei großer Reibung dauert es jedoch einige Zeit. | ||
| Resonanz/Vibration | Die Drehzahlwelligkeit ist groß und die Resonanz kann vom Motor nicht unterdrückt werden. | Geschwindigkeitsschwankungen und Resonanzen können mithilfe von Treiberfunktionen unterdrückt werden. | ||
| Trägheitsverhältnis | Wenn die Trägheit groß ist, kann der Motor nicht gesteuert werden. | Der Motor kann auch dann gesteuert werden, wenn das Trägheitsverhältnis groß ist. | ||
| Was ich gut kann Richtige Verwendung |
Behalten Sie die gleiche Position bei. | Stabil rotieren (ohne Vibrationen oder Geräusche). | ||
| Niedrige Geschwindigkeit, Start-/Stopp-Betrieb über kurze Distanzen. | Start- und Stoppvorgänge mit hoher Geschwindigkeit und hoher Beschleunigung. | |||
| Leichte Bearbeitung. | Präzisionsbearbeitung, Schwerzerspanungsarbeiten. | |||
Veröffentlichungsdatum:



Die Fertigung strebt danach, weltweit die Nummer 1 zu sein

Technische Möglichkeiten, die eine erweiterte Anpassung ermöglichen

Bald 100-jähriges Jubiläum

globales Netzwerk

