

Wissen
[Typen und Merkmale] Was ist ein Motor?



Ein Motor ist ein Gerät, das aus elektrischer Energie mechanische Kraft erzeugt. Sie werden in allen möglichen beweglichen Dingen eingesetzt, von bekannten Haushaltsgeräten wie Waschmaschinen, elektrischen Ventilatoren und Klimaanlagen bis hin zu Gegenständen im Zusammenhang mit der sozialen Infrastruktur wie Geldautomaten (Geldautomaten) und automatischen Fahrkartenschaltern.
In diesem Sinne kann man sagen, dass alle heute lebenden Menschen von den Vorteilen von Motoren profitieren. Zu den Energiequellen, die mechanische Energie erzeugen, zählen neben Motoren auch Motoren und Dampfmaschinen.
Motoren verfügen jedoch über drei Eigenschaften, die andere Stromquellen nicht haben.
Beispielsweise soll der thermische Wirkungsgrad eines typischen Motors 30 bis 40 % betragen. Das bedeutet, dass nur 30 bis 40 % der zugeführten Energie als Strom genutzt werden und die restlichen 60 bis 70 % als Wärme verschwendet werden.
Andererseits liegt der Energieumwandlungswirkungsgrad von Motoren bei über 80 %. Auf diese Weise kann im Vergleich zu einem Motor Energie in Strom umgewandelt werden, ohne dass sie verschwendet wird.
Ein Motor besteht aus vielen mechanischen Teilen und jedes Teil muss mit hoher Präzision gefertigt werden. Darüber hinaus werden viele Sensoren zur elektronischen Steuerung des Motors verwendet, was die Steuerung komplex macht.
Im Vergleich zu Motoren sind Motoren einfacher aufgebaut und können direkt elektrisch angetrieben werden, wodurch sie für eine präzise elektrische Steuerung geeignet sind.
Vergessen Sie auch diesen Punkt nicht. Da Motoren Benzin verbrennen und in Strom umwandeln, stoßen sie zwangsläufig Kohlendioxid (CO2) aus. Andererseits stößt ein Motor selbst kein Gas aus.
Da sich der Trend zur CO2-Neutralität beschleunigt, werden große Erwartungen an Motoren gestellt.
Aufgrund dieser Eigenschaften spielen Motoren derzeit die Rolle von Stromquellen und Steuergeräten für eine Vielzahl von Geräten und Anlagen. Zukünftig wird die Zahl der Einsatzsituationen weiter zunehmen.
Verwandter Artikel: Wissen „Was ist ein Schrittmotor? Erklärung seines Mechanismus, seiner Typen, seiner Verwendung (Antriebssystem und Steuerungsmethode), seiner Vorteile und Funktionen“
Hier erklären wir genauer, wie Schrittmotoren funktionieren und welche Funktionen sie bieten.

Motoren wurden im Zuge der technologischen Innovation in der Gesellschaft erfunden und weiterentwickelt.
Ursprünglich bewegte der Mensch Gegenstände mit menschlicher oder tierischer Kraft. Sowohl in der Antike als auch heute war es für Menschen schon immer üblich, Dinge aus eigener Kraft zu bewegen. Darüber hinaus sollen Pferdekutschen bereits vor Christus erfunden worden sein, und wie Sie wissen, benutzten Japans Heian-Aristokraten Ochsenkarren.
Unabhängig davon, wie viele Hebel und Flaschenzüge mit menschlicher oder tierischer Kraft eingesetzt wurden, gab es jedoch Grenzen für Geschwindigkeit und Kraft.
Die industrielle Revolution vom späten 17. bis zum 19. Jahrhundert brachte einen großen Wandel in dieser Art von Energie mit sich.
Die Dampfmaschine, deren Leistung die von Menschen und Tieren bei weitem übertraf, erschien und die fabrikbasierte Maschinenindustrie entstand. Die soziale Struktur veränderte sich von einer Agrargesellschaft zu einer Industriegesellschaft. Darüber hinaus veränderte die Entwicklung von Dampflokomotiven, Dampfwagen und Dampfschiffen die Transport- und Logistikform erheblich. Allerdings hatten Dampfmaschinen den Nachteil, dass sie groß und schwer waren.
Erfinder und Forscher begannen, nach alternativen Energiequellen zur Dampfmaschine zu suchen. Im Zuge dieser Veränderungen entstanden auch Motoren.
Der britische Wissenschaftler Michael Faraday entdeckte 1821 das Prinzip von Motoren und Generatoren. 1831 entdeckte er das Gesetz der elektromagnetischen Induktion. Dies wird auf Motoren angewendet.
Nach Faraday wurde von Thomas Davenport und anderen in den Vereinigten Staaten ein Gleichstrommotor (Gleichstrommotor) entwickelt, dessen praktischer Einsatz jedoch schwierig war.
Der erste praktische Motor war der von Nikola Tesla erfundene Zweischicht-Wechselstrom-Induktionsmotor. 1888 entwickelte Tesla einen mehrphasigen Induktionsgenerator, um den von ihm erfundenen Motor anzutreiben, und 1889 erhielt er ein Patent dafür. Dadurch werden Motoren in die Praxis umgesetzt.
Seitdem haben sich Motoren weiterentwickelt und übernehmen nicht nur die Rolle als Energiequelle, sondern auch als Steuergerät. Derzeit wird gesagt, dass 50 % des japanischen Stroms von Motoren verbraucht werden. Motoren sind so tief in das menschliche Leben eingebunden, dass sie die Zivilisation unterstützen.
Die Geschichte der Motoren von SANYO DENKI reicht bis in die erste Hälfte des 20. Jahrhunderts zurück.
Zunächst entwickelten sie 1932 einen Generator mit der gleichen Grundstruktur wie ein Motor für den Einsatz in drahtlosen Kommunikationsgeräten. Im Jahr 1952 stellte das Unternehmen die rotierenden Maschinen, die es bis dahin als Stromquellen für die militärische Kommunikation hergestellt hatte, auf eine zivile Nutzung um. SANYO DENKI entwickelte sich zu einem bedeutenden Hersteller in den Bereichen Telekommunikation und Stromversorgung.
Im Jahr 1952 erhielt das Unternehmen vom Electrotechnical Testing Laboratory (heute National Institute of Advanced Industrial Science and Technology) die Anfrage zur Entwicklung eines Servomotors und begann mit der Forschung. Bald darauf stellten wir den ersten in Japan produzierten Servomotor fertig. Anfangs war die Nachfrage nicht so groß wie erwartet und das Projekt wurde nie verwirklicht. Es legte jedoch den Grundstein für das heutige Unternehmen SANYO DENKI dessen Hauptprodukt Servomotoren sind.
Nach der Fertigstellung des Servomotors haben wir auch den ersten im Inland hergestellten Schrittmotor und den ersten im Inland hergestellten Lüfter fertiggestellt. Während wir diese „Neuheiten in Japan“ entwickeln, reiten wir auf der Welle von OA (Büroautomation) und FA (Fabrikautomation) und erweitern unsere verschiedenen Motoren weltweit.
Grundsätzlich dreht sich ein Motor, indem er die Eigenschaften von Magneten nutzt: „verschiedene Pole ziehen sich gegenseitig an“ und „gleiche Pole stoßen sich gegenseitig ab“.
Stellen Sie sich zum Beispiel einen kleinen Motor vor, der in Funksteuerungen verwendet wird. Ein kleiner Motor besteht aus einer Spule mit einer rotierenden Welle und Permanentmagneten mit Nord- und Südpolen, die auf beiden Seiten der Spule angebracht sind.
Wenn Strom an den Motor angelegt wird, wird die Spule zu einem Elektromagneten. Es ist möglicherweise einfacher zu verstehen, wenn Sie sich vorstellen, dass sich die Spule in einen Magneten mit Nord- und Südpolen verwandelt.
Dann stoßen sich der Nordpol-Permanentmagnet und der Nordpol der Spule ab, und der Südpol-Permanentmagnet und der Südpol der Spule stoßen sich ab. Dies bedeutet auch, dass sich der Nordpol-Permanentmagnet und der Südpol der Spule gegenseitig anziehen, und dass sich der Südpol-Permanentmagnet und der Nordpol der Spule gegenseitig anziehen.
Dadurch dreht sich die Spule um 180 Grad um die Rotationsachse.
Wenn dies jedoch allein geschieht, stoppt die Drehung der Spule um 180 Grad. Dies liegt daran, dass sich der Nordpol-Permanentmagnet und der Südpol der Spule gegenseitig anziehen und der Südpol-Permanentmagnet und der Nordpol der Spule weiterhin zueinander angezogen bleiben. Was muss ich tun, um es um 180 Grad weiter zu drehen und dann die Drehachse um 360 Grad zu drehen?
Daher können durch Ändern der Richtung des durch die Spule fließenden Stroms die Positionen der Nord- und Südpole vertauscht werden.
Im zuvor gestoppten Zustand wurden der N-Pol-Permanentmagnet und der S-Pol der Spule zueinander angezogen, und der S-Pol-Permanentmagnet und der N-Pol der Spule wurden zueinander angezogen. Dort fließt der elektrische Strom durch die Bürsten und ändert die Flussrichtung mithilfe einer Komponente, die als Kommutator bezeichnet wird, wodurch der Nord- und der Südpol der Spule vertauscht werden.
Dann stoßen sich der Nordpol des Permanentmagneten und der Nordpol der Spule gegenseitig ab, und der Südpol des Permanentmagneten und der Südpol der Spule stoßen sich gegenseitig ab. Gleichzeitig ziehen sich der Nordpol des Permanentmagneten und der Südpol der Spule gegenseitig an, und der Südpol des Permanentmagneten und der Nordpol der Spule ziehen sich gegenseitig an. Dadurch dreht sich die Spule um weitere 180 Grad. Es ist jetzt um 360 Grad gedreht.
Durch die Wiederholung dieser Bewegungsabfolge dreht sich der Motor kontinuierlich.
Von hier aus werden wir „Motoren als Energiequellen“ und „Motoren als Steuergeräte“ vorstellen.
Motoren, die als Stromquelle für Geräte und Anlagen dienen, lassen sich je nach Stromversorgung in zwei Haupttypen einteilen: Gleichstrommotoren und Wechselstrommotoren.
Ein „Gleichstrommotor“ ist ein Motor, der mit Gleichstrom betrieben wird.
Sie werden in einer Vielzahl von Dingen verwendet, von Alltagsgeräten bis hin zu Geräten, die in Fabriken verwendet werden.
Es gibt zwei Arten von Gleichstrommotoren: bürstenbehaftete Gleichstrommotoren und bürstenlose Gleichstrommotoren. Eine Bürste ist eine Komponente, die Strom an die Spule überträgt.
Ein bürstenbehafteter Gleichstrommotor hat innen eine Spule und außen einen Permanentmagneten und dreht den Rotor (rotierende Welle), indem er Gleichstrom durch die Bürsten leitet. Dies ist der erste Motor, der mit einem einfachen Mechanismus eingeführt wurde und in Funksteuerungen und Modellen verwendet wird.
Ein Merkmal dieses Motors ist, dass die Drehzahl grundsätzlich proportional zur Spannung zunimmt.
Wenn beispielsweise ein Bürsten-Gleichstrommotor mit Batterien betrieben wird, dreht er sich schneller, wenn zwei Batterien angeschlossen sind, als wenn eine Batterie verwendet wird. Der Kommutator, der die Richtung des durch die Spule fließenden Stroms ändert, und die Kohlebürsten stehen jedoch ständig in Kontakt miteinander, sodass sie bei längerem Betrieb verschleißen und daher regelmäßig gewartet werden müssen.
Ein bürstenloser Gleichstrommotor (BLDC-Motor) hingegen verfügt über einen Permanentmagneten im Inneren und eine Spule an der Außenseite und ist ein Motor, der den inneren Permanentmagneten dreht, indem er über einen Stromsteuerkreis Strom durch die Spule leitet.
Das Fehlen von Bürsten reduziert nicht nur die Wartungshäufigkeit, sondern die Bürsten hinterlassen auch keine Abnutzungsrückstände, sodass sie in einer sauberen Umgebung verwendet werden können. Allerdings erfordert er einen Schaltkreis außerhalb des Motors, um die Stromrichtung zu steuern, und ist teurer als ein Gleichstrommotor mit Bürsten.
| Motortyp |
Verdienst | Nachteile |
|---|---|---|
| bürstenbehafteter Gleichstrommotor | niedrige Kosten | Verschlechtert sich schnell |
| bürstenloser Gleichstrommotor | langes Leben | hohe Kosten |
Ein „Wechselstrommotor“ ist ein Motor, der durch fließenden Wechselstrom betrieben wird. Außen befindet sich eine Spule und innen ein „käfigförmiger“ Rotor.
Das Besondere an Wechselstrommotoren ist, dass sie keine Kommutatoren, Bürsten oder Steuerkreise benötigen. Da es eine einfache Struktur hat und kostengünstig hergestellt werden kann, wird es in einer Vielzahl von Anwendungen eingesetzt, darunter Haushaltsgeräte wie elektrische Ventilatoren und Staubsauger, Wasserpumpen und Förderbänder sowie Industrieanlagen.
Typische Beispiele für Motoren, die zur präzisen Steuerung des Betriebs von Geräten und Anlagen eingesetzt werden, sind Schrittmotoren und Servomotoren.
Ein Schrittmotor ist ein Motor, dessen Rotor sich um einen festen Winkel (Position) dreht.
Stellen Sie sich eine analoge Uhr vor. Der Sekundenzeiger bewegt sich jeweils eine Sekunde. Ein Schrittmotor kann so gesteuert werden, dass er sich um einen vorgegebenen Winkel bewegt. Neben analogen Uhren werden sie auch in Druckern, Klimaanlagenlamellen, Geldautomaten, Fahrkartenautomaten, automatischen Fahrkartenschaltersystemen usw. verwendet.
Der Mechanismus zum Drehen des Rotors um einen präzisen Winkel ist einfach. Der Rotor eines Schrittmotors hat viele Rillen. Dann wird der Motor mit Strom versorgt, und sobald der Rotor die vorgesehene Nut bewegt hat, wird der Strom abgeschaltet. Dadurch dreht sich der Rotor um einen genauen Winkel und stoppt dann.
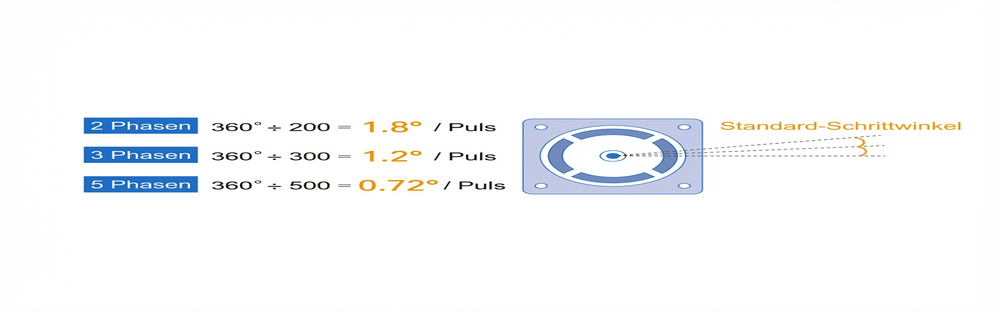
Beispielsweise verfügt ein Zweiphasen-Schrittmotor typischerweise über 200 Nuten. Da eine Drehung von 360 Grad in 200 Teile unterteilt ist, beträgt der Bewegungswinkel pro Nut 1,8 Grad. Wenn Sie den Motor um 18 Grad drehen möchten, müssen Sie den Motor mit Strom versorgen, den Rotor durch 10 Rillen bewegen und dann den Strom abschalten.
Um einen Schrittmotor zu steuern, benötigen Sie einen Controller. Die Aufgabe des Controllers besteht darin, Signale zu senden, die dem Schrittmotor mitteilen, wie weit er sich bewegen soll. Erstens wird davon ausgegangen, dass ein Stromstoß vom Ein- bis zum Aus-Zustand als ein Impuls gezählt wird. Wenn die Steuerung dann ein einzelnes Impulssignal an den Schrittmotor sendet, dreht sich der Rotor um eine Rille und stoppt dann.
Nehmen wir wie im vorherigen Beispiel an, Sie möchten einen Zweiphasen-Schrittmotor mit 200 Nuten um 18 Grad drehen. In diesem Fall sendet der Controller ein 10-Puls-Signal. Wenn der Schrittmotor das Signal empfängt, dreht er sich um 18 Grad oder 10 Rillen und stoppt dann.
Auf diese Weise ist ein Controller erforderlich, um einen Schrittmotor zu steuern.

Ein Servomotor ist wie ein Schrittmotor ein Motor, dessen Zweck darin besteht, einen Rotor um einen bestimmten Winkel zu drehen. Allerdings gibt es deutliche Unterschiede zwischen Servomotoren und Schrittmotoren.
Rotoren von Servomotoren haben keine Rillen. Daher gibt es keine Einschränkung wie das Drehen des Rotors in 1,8-Grad-Schritten. Wenn hochauflösende Sensoren verwendet werden, kann der Rotor bei präzisen Winkeln von 1/1.000.000 Grad gestoppt werden.
Für diese Steuerung sind Sensoren notwendig. Bei Servomotoren bestimmt dieser Sensor genau die Drehposition des Rotors und ermöglicht so das Anhalten im gewünschten Winkel. Darüber hinaus wird die Maschine auch nach dem Stoppen weiterhin überwacht und bei Abweichungen vom Stoppwinkel sofort automatisch korrigiert.
Oben haben wir die Rolle und Typen von Motoren, ihre Geschichte, Funktionsprinzipien und Strukturen vorgestellt.
Das Verständnis der Motoreigenschaften hilft bei der Auswahl des optimalen Motors und verbessert die Leistung der Anlage.
SANYO DENKI bietet eine Vielzahl von Motoren an. Sollten Sie Fragen zur Motorauswahl haben, nehmen Sie bitte Kontakt mit uns auf.
Veröffentlichungsdatum:



Die Fertigung strebt danach, weltweit die Nummer 1 zu sein

Technische Möglichkeiten, die eine erweiterte Anpassung ermöglichen

Bald 100-jähriges Jubiläum

globales Netzwerk

