Bilik Darjah Sanyo
[Jenis dan Ciri] Apakah motor langkah? Mekanisme dan jenis



Motor penginjak ialah sejenis motor terkawal yang bergerak dan berputar pada sudut tetap seperti jam dengan menukar fasa arus yang mengalir. Ia boleh diletakkan tanpa sensor. Ia juga dipanggil motor denyut, motor langkah atau motor penginjak.
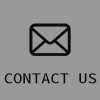
Motor stepping dikelaskan kepada jenis 2 fasa, 3 fasa dan 5 fasa bergantung kepada strukturnya.
Sudut yang boleh digerakkan oleh motor langkah, yang berputar seperti jam, dengan satu denyutan dipanggil "sudut langkah rujukan." Lebih halus sudut langkah rujukan, lebih lancar dan lebih tepat pergerakannya.
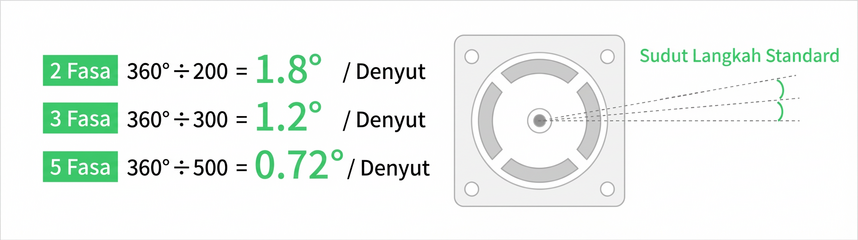

Pemacu diperlukan untuk memacu motor penggerak. Semasa membuat pemacu, sila ambil perhatian bahawa untuk motor dua fasa, litar pemacu berbeza bergantung pada sama ada ia pemacu bipolar atau unipolar. Untuk motor tiga fasa dan lima fasa, pemacu yang boleh mengalirkan arus dalam kedua-dua arah diperlukan.
Tambahan pula, kerana motor langkah dua fasa dan tiga fasa mempunyai struktur penggulungan yang mudah, ia boleh diputar dengan litar pemacu yang sama, tanpa mengira pengeluarnya. Walau bagaimanapun, motor langkah lima fasa mempunyai struktur penggulungan yang kompleks, dan tiada gabungan atau susunan fasa tunggal yang mesti digunakan untuk memutarkan motor. Oleh itu, apabila menggunakan motor langkah lima fasa, penjagaan mesti diambil semasa memilih pemacu untuk digunakan.
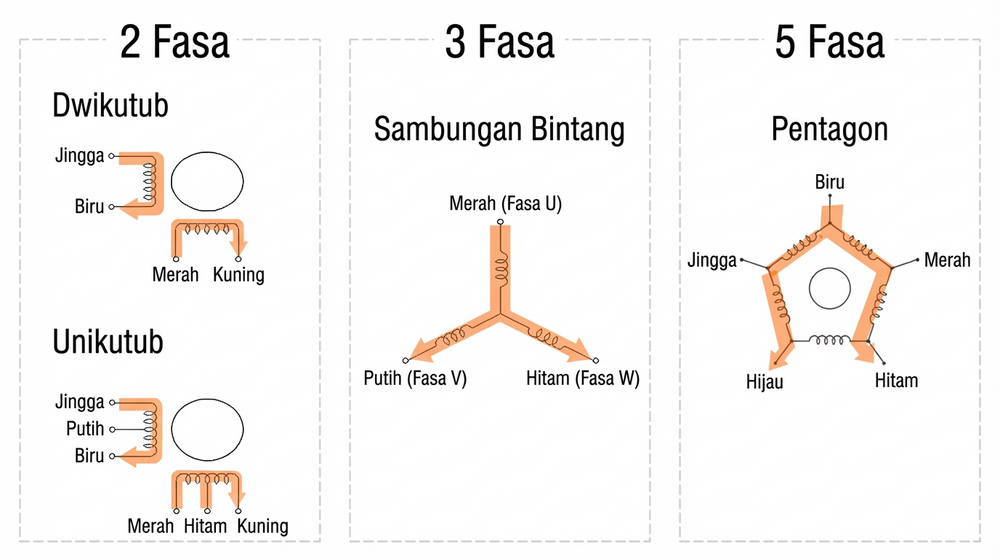
Pertama, berkenaan isyarat arahan denyut, ini adalah isyarat elektrik yang berulang kali menghidupkan/mematikan voltan (TINGGI/RENDAH). Satu kitaran TINGGI/RENDAH dikira sebagai satu denyut.
Isyarat denyut dimasukkan kepada pemacu daripada pengawal hos, dan sudut putaran dikawal oleh bilangan isyarat denyut ini.
Kawalan kelajuan motor melangkah
Kelajuan putaran dikawal oleh ketumpatan nombor denyut. Jika satu denyut berputar satu sudut langkah rujukan, penghantaran 10 denyutan sesaat akan memutarkan sudut yang lebih besar sesaat daripada penghantaran satu denyutan sesaat. Oleh itu, semakin tinggi frekuensi denyutan, semakin cepat kelajuan putaran.
Kawalan kedudukan motor melangkah
Pemandu baru-baru ini telah menggunakan kaedah mikrolangkah yang membolehkan kawalan tepat terhadap jumlah arus yang mengalir melalui setiap fasa, membolehkan kedudukan pada sudut yang lebih kecil daripada sudut langkah rujukan motor, sekali gus membolehkan kawalan kedudukan yang lebih tepat.
Kelebihan 1: Mudah dikawal
Ia boleh diputar dengan mudah hanya dengan menghidupkan dan mematikan transistor pemacu dengan betul. Kelajuan putaran juga boleh ditingkatkan dengan mudah hanya dengan mempercepatkan pemasaan hidup/mati.
Kelebihan 2: Penyederhanaan sistem mungkin
Motor ini boleh dikawal dengan mudah dengan memasukkan denyutan dan frekuensinya kepada pemandu, sekali gus menghapuskan keperluan untuk pengawal yang kompleks. Tambahan pula, ciri terhebat motor penggerak ialah ia boleh mengawal kedudukan dan kelajuan tanpa pengesan, yang memudahkan sistem.
Kelebihan 3: Kemungkinan untuk membina sistem yang murah
Pemacu adalah mudah, tiada pengesan diperlukan, dan tiada pengawal yang kompleks diperlukan, jadi sistem ini boleh dibina dengan murah.
Kelebihan 4: Perhentian yang stabil adalah mungkin
Oleh kerana motor penggerak ialah motor yang berhenti menggunakan daya magnet, ia menghasilkan daya berhenti (menahan tork) dan berhenti secara stabil.
Walaupun kita tidak melihat motor langkah secara langsung dalam kehidupan seharian kita, ia berfungsi di dalam banyak mesin yang menyokong kehidupan kita dalam pelbagai situasi yang berbeza. Di manakah ia sebenarnya digunakan? Beberapa contoh tipikal disenaraikan di bawah.
Untuk maklumat lanjut, sila lihat "Apakah motor langkah? Aplikasi dan contoh penggunaan motor langkah."
Awas 1: Kehilangan penyegerakan
Walaupun sensor tidak diperlukan, memandangkan kedudukannya tidak disahkan, adalah mustahil untuk melihat jika motor tidak bergerak mengikut arahan (melangkah keluar). Berbanding dengan motor servo yang menggunakan kawalan gelung tertutup, ia kurang andal.
Awas 2: Demam tinggi
Haba dihasilkan kerana tork penahan dijana walaupun enjin dihentikan.
Awas 3: Getaran
Sebuah motor berputar pada sudut tetap dan bergerak selangkah pada satu masa, seperti naik atau turun tangga, jadi ia pasti akan bergetar apabila bergerak.
| Motor langkah | Motor servo | |||
| kawalan | Gelung Terbuka | Gelung Tertutup | ||
| tork | Tiada pengesan | Tork malar sentiasa dijana dalam arah yang menghentikan motor. | Pengesan Arus Motor | Arus motor dikawal mengikut arah putaran motor, menghasilkan tork yang diarahkan. |
| Kelajuan putaran | Tiada pengesan | Ia berputar pada kelajuan yang disegerakkan dengan frekuensi denyut input. Jika ia tidak dapat disegerakkan, ia akan keluar. | Pengesan Kelajuan Motor | Kelajuan motor diperiksa semasa bergerak supaya ia berputar pada kelajuan yang diarahkan. |
| kedudukan (sudut) | Tiada pengesan | Ia bergerak mengikut bilangan denyutan input. Jika ia tidak bergerak tepat pada masanya, ia akan melangkah keluar. | Pengesan Kedudukan Motor | Kedudukan motor diperiksa semasa ia bergerak untuk mencapai kedudukan sasaran yang diperintahkan. |
| Ciri-ciri | Murah, mudah digunakan, dan tork tinggi pada kelajuan rendah | Walaupun mahal, ia mempunyai pelbagai fungsi dan tork yang tinggi sehingga kelajuan tinggi. | ||
| geseran | Walaupun dengan geseran yang besar, kedudukan boleh dilakukan dengan cepat dan tepat. | Kedudukan yang tepat adalah mungkin, tetapi ia mengambil masa jika geseran tinggi. | ||
| Resonans/getaran | Riak kelajuan adalah besar dan motor tidak dapat menyekat resonans. | Riak kelajuan dan resonans boleh dikawal menggunakan fungsi pemandu. | ||
| Nisbah inersia | Jika inersia terlalu besar, motor tidak dapat dikawal. | Motor boleh dikawal walaupun nisbah inersia adalah besar. | ||
| Apa yang saya mahir Kegunaan yang berbeza |
Kekalkan kedudukan yang sama. | Putaran mestilah stabil (tanpa getaran atau bunyi bising). | ||
| Operasi mula/henti jarak dekat, berkelajuan rendah. | Operasi mula/henti berkelajuan tinggi, pecutan tinggi. | |||
| Operasi pemesinan ringan. | Pemesinan jitu, operasi pemesinan berat. | |||
Tarikh keluaran:



Berhasrat untuk menjadi pengeluar No. 1 dunia dalam pembuatan

Keupayaan teknikal yang membolehkan penyesuaian lanjutan

Hampir ulang tahun ke-100 kami

Rangkaian Global