

Silid-aralan ng Sanyo
[Mga Uri at Katangian] Ano ang isang stepping motor? Mekanismo at mga uri



Ang stepping motor ay isang uri ng kontroladong motor na gumagalaw at umiikot sa isang nakapirming anggulo tulad ng orasan sa pamamagitan ng pagpapalit ng phase kung saan dumadaloy ang kuryente. Maaari itong iposisyon nang walang sensor. Tinatawag din itong pulse motor, step, o stepper motor.
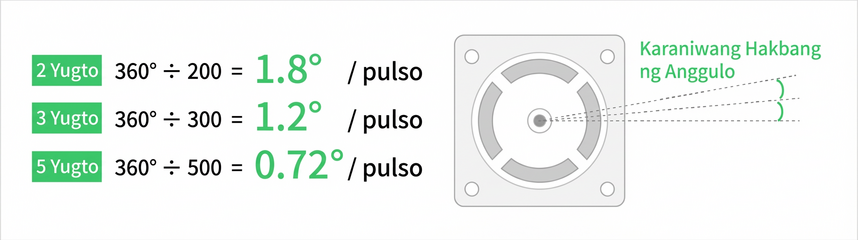
Ang mga stepping motor ay inuuri sa 2-phase, 3-phase, at 5-phase na uri depende sa kanilang istraktura.
Ang anggulong kayang igalaw ng isang stepping motor, na umiikot na parang orasan, sa isang pulso ay tinatawag na "reference step angle." Kung mas pino ang reference step angle, mas makinis at mas tumpak ang magiging galaw.

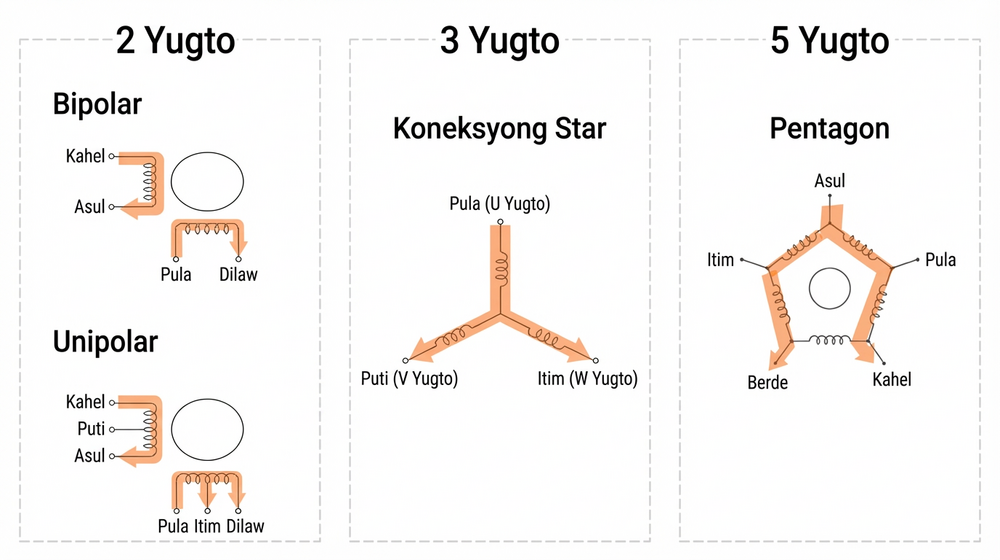
Kinakailangan ang isang driver upang magpatakbo ng stepping motor. Kapag gumagawa ng driver, pakitandaan na para sa mga two-phase motor, ang drive circuit ay nag-iiba depende sa kung ito ay bipolar o unipolar drive. Para sa mga three-phase at five-phase motor, kinakailangan ang isang driver na maaaring magpasa ng kuryente sa magkabilang direksyon.
Bukod pa rito, dahil ang mga two-phase at three-phase stepping motor ay may simpleng istrukturang paikot-ikot, maaari silang paikutin gamit ang parehong drive circuit, anuman ang tagagawa. Gayunpaman, ang mga five-phase stepping motor ay may kumplikadong istrukturang paikot-ikot, at walang iisang kombinasyon o pagkakasunud-sunod ng mga phase na kailangang ilapat upang paikutin ang motor. Samakatuwid, kapag gumagamit ng five-phase stepping motor, dapat maging maingat sa pagpili ng driver na gagamitin.
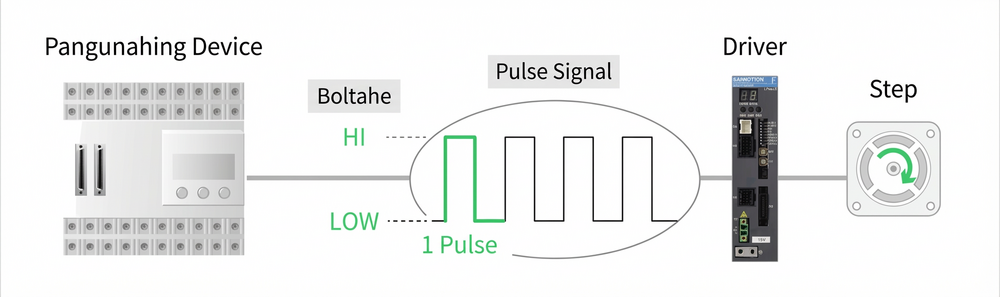
Una, tungkol sa mga signal ng pulse command, ito ay mga electrical signal na paulit-ulit na nagpapa-ON/OFF ng boltahe (HI/LOW). Ang isang HI/LOW cycle ay binibilang bilang isang pulse.
Ang mga pulse signal ay ipinapasok sa driver mula sa isang host controller, at ang anggulo ng pag-ikot ay kinokontrol ng bilang ng mga pulse signal na ito.
Kontrol ng bilis ng stepping motor
Ang bilis ng pag-ikot ay kinokontrol ng densidad ng bilang ng pulso. Kung ang isang pulso ay umiikot sa isang anggulo ng sangguniang hakbang, ang pagpapadala ng 10 pulso bawat segundo ay mag-iikot ng mas malaking anggulo bawat segundo kaysa sa pagpapadala ng isang pulso bawat segundo. Samakatuwid, mas mataas ang dalas ng pulso, mas mabilis ang bilis ng pag-ikot.
Kontrol sa posisyon ng stepping motor
Ang mga kamakailang drayber ay gumamit ng isang microstep na pamamaraan na nagbibigay-daan para sa tumpak na kontrol sa dami ng kuryenteng dumadaloy sa bawat phase, na nagbibigay-daan sa pagpoposisyon sa mga anggulong mas maliit kaysa sa reference step angle ng motor, sa gayon ay nagbibigay-daan sa mas tumpak na pagkontrol sa posisyon.
Bentahe 1: Madaling kontrolin
Madali itong paikutin sa pamamagitan lamang ng pag-on at off nang tama ng driver transistor. Ang bilis ng pag-ikot ay madali ring mapataas sa pamamagitan lamang ng pagpapabilis ng on/off timing.
Bentahe 2: Posibleng gawing simple ang sistema
Madaling makontrol ang motor sa pamamagitan ng paglalagay ng mga pulso at ang kanilang dalas sa driver, na nag-aalis ng pangangailangan para sa isang kumplikadong controller. Bukod pa rito, ang pinakamagandang katangian ng mga stepping motor ay maaari nilang kontrolin ang posisyon at bilis nang walang detector, na nagpapadali sa sistema.
Bentahe 3: Posibleng bumuo ng isang murang sistema
Simple lang ang driver, hindi kailangan ng detector, at hindi kailangan ng kumplikadong controller, kaya maaaring itayo ang sistema nang mura.
Bentahe 4: Posible ang matatag na paghinto
Dahil ang stepping motor ay isang motor na humihinto gamit ang magnetic force, bumubuo ito ng stopping force (pumipigil sa torque) at tumitigil nang matatag.
Bagama't hindi natin direktang nakikita ang mga stepping motor sa ating pang-araw-araw na buhay, gumagana ang mga ito sa loob ng maraming makina na sumusuporta sa ating buhay sa iba't ibang sitwasyon. Saan talaga sila ginagamit? Ang ilang karaniwang halimbawa ay nakalista sa ibaba.
Para sa karagdagang impormasyon, pakitingnan ang "Ano ang stepping motor? Mga aplikasyon at halimbawa ng paggamit ng stepping motor."
Babala 1: Pagkawala ng synchronization
Bagama't hindi kinakailangan ang mga sensor, dahil hindi pa nakumpirma ang posisyon, hindi posibleng mapansin kung ang motor ay hindi gumagalaw ayon sa mga tagubilin (stepping out). Kung ikukumpara sa mga servo motor na gumagamit ng closed-loop control, ito ay hindi gaanong maaasahan.
Babala 2: Mataas na lagnat
Nalilikha ang init dahil nalilikha ang holding torque kahit na nakatigil ang makina.
Pag-iingat 3: Panginginig ng boses
Ang motor ay umiikot sa isang nakapirming anggulo at gumagalaw nang paisa-isang hakbang, tulad ng pag-akyat o pagbaba sa hagdanan, kaya hindi maiiwasang mag-vibrate ito kapag gumagalaw.
| Motor na panghakbang | Servo motor | |||
| kontrol | Bukas na Loop | Saradong Loop | ||
| metalikang kuwintas | Walang detektor | Isang pare-parehong metalikang kuwintas ang laging nalilikha sa direksyon na humihinto sa motor. | Detektor ng Kasalukuyang Motor | Ang kuryente ng motor ay kinokontrol sa direksyon ng pag-ikot nito, na bumubuo ng iniuutos na metalikang kuwintas. |
| Bilis ng pag-ikot | Walang detektor | Ito ay umiikot sa bilis na naka-synchronize sa input pulse frequency. Kung hindi ito makapag-synchronize, ito ay lalabas. | Detektor ng Bilis ng Motor | Sinusuri ang bilis ng motor habang gumagalaw upang ito ay umiikot sa iniutos na bilis. |
| posisyon (anggulo) | Walang detektor | Gumagalaw ito ayon sa bilang ng mga input pulse. Kung hindi ito gagalaw sa tamang oras, lalabas ito. | Detektor ng Posisyon ng Motor | Sinusuri ang posisyon ng motor habang gumagalaw ito upang maabot ang iniutos na target na posisyon. |
| Mga Tampok | Mura, madaling gamitin, at mataas na metalikang kuwintas sa mababang bilis | Bagama't mahal, mayroon itong iba't ibang mga tungkulin at mataas na metalikang kuwintas hanggang sa matataas na bilis. | ||
| alitan | Kahit na may malaking alitan, posible pa rin ang pagpoposisyon nang mabilis at tumpak. | Posible ang eksaktong pagpoposisyon, ngunit matagal kung mataas ang friction. | ||
| Resonans/panginginig | Malaki ang speed ripple at hindi kayang pigilan ng motor ang resonance. | Maaaring pigilan ang bilis ng ripple at resonance gamit ang mga function ng driver. | ||
| Proporsyon ng inersiya | Kung ang inertia ay masyadong malaki, ang motor ay hindi makontrol. | Maaaring kontrolin ang motor kahit na malaki ang inertia ratio. | ||
| Ang magaling ako Iba't ibang gamit |
Panatilihin ang parehong posisyon. | Dapat na matatag ang pag-ikot (walang panginginig o ingay). | ||
| Mababang bilis, operasyon ng pagsisimula/paghinto sa maikling distansya. | Mataas na bilis, mataas na acceleration start/stop operation. | |||
| Magaan na operasyon ng machining. | Pagma-machining nang may katumpakan, mga operasyon ng mabibigat na machining. | |||
Petsa ng paglabas:



Layuning maging No. 1 sa mundo sa pagmamanupaktura

Mga kakayahang teknikal na nagbibigay-daan sa advanced na pagpapasadya

Malapit na ang ika-100 anibersaryo natin

Pandaigdigang Network

