

Silid-aralan ng Sanyo
[Mga Uri at Katangian] Ano ang motor?



Ang mga motor ay mga aparatong bumubuo ng mekanikal na enerhiya mula sa kuryente. Ginagamit ang mga ito sa lahat ng uri ng gumagalaw na bagay, mula sa mga pamilyar na kagamitan sa bahay tulad ng mga washing machine, electric fan, at air conditioner hanggang sa mga imprastrakturang panlipunan tulad ng mga ATM (automated teller machine) at mga awtomatikong ticket gate.
Sa ganitong diwa, masasabing lahat ng nabubuhay ngayon ay nakikinabang sa mga motor sa kanilang pang-araw-araw na buhay. Bukod sa mga motor, may iba pang pinagmumulan ng kuryente na lumilikha ng mekanikal na lakas, tulad ng mga makina at mga makinang de-singaw.
Gayunpaman, ang mga motor ay may tatlong katangian na wala sa ibang pinagmumulan ng kuryente.
Halimbawa, ang thermal efficiency ng isang karaniwang makina ay sinasabing 30-40%, na nangangahulugang 30-40% lamang ng enerhiyang na-input ang nako-convert sa kuryente, habang ang natitirang 60-70% ay nasasayang bilang init.
Sa kabilang banda, ang kahusayan sa conversion ng enerhiya ng isang motor ay mahigit 80%, ibig sabihin ay kaya nitong i-convert ang enerhiya sa lakas nang hindi nasasayang, kumpara sa isang makina.
Ang isang makina ay binubuo ng maraming mekanikal na bahagi, na ang bawat isa ay dapat gawin nang may katumpakan. Bukod pa rito, maraming sensor ang ginagamit upang elektronikong kontrolin ang makina, na ginagawang kumplikado ang kontrol.
Kung ikukumpara sa mga makina, ang mga motor ay may mas simpleng istraktura at maaaring direktang patakbuhin ng kuryente, kaya angkop ang mga ito para sa tumpak na pagkontrol sa kuryente.
Mahalagang tandaan na ang mga makina ay nagsusunog ng gasolina upang makabuo ng kuryente, na hindi maiiwasang nagreresulta sa paglabas ng carbon dioxide (CO2), samantalang ang mga motor ay hindi naglalabas ng anumang gas.
Habang bumibilis ang pagkilos tungo sa pagkamit ng carbon neutrality, malaki ang inaasahan sa mga motor.
Dahil sa mga katangiang ito, ang mga motor ay kasalukuyang ginagamit bilang mga pinagmumulan ng kuryente at mga aparatong pangkontrol para sa malawak na hanay ng mga kagamitan at aparato, at inaasahang patuloy na tataas ang kanilang mga aplikasyon sa hinaharap.
Kaugnay na artikulo: Sanyo Classroom "Ano ang stepping motor? Paliwanag ng mekanismo, mga uri, gamit (drive system at paraan ng pagkontrol), mga bentahe at katangian nito"
Dito ay nagbibigay kami ng mas detalyadong paliwanag tungkol sa mekanismo at mga katangian ng mga stepping motor.

Ang mga motor ay naimbento at umunlad kasabay ng daloy ng teknolohikal na inobasyon sa lipunan.
Ang mga tao ay orihinal na nagpapagalaw ng mga bagay gamit ang kapangyarihan ng tao o hayop. Ang pagpapagalaw ng mga bagay gamit ang sariling kapangyarihan ay isang karaniwang gawain noon at nagpapatuloy hanggang ngayon. Sinasabing ang mga karwaheng hila ng kabayo ay naimbento bago pa man si Kristo, at gaya ng alam nating lahat, ang mga aristokratang Hapones noong panahon ng Heian ay gumamit ng mga kariton ng baka.
Gayunpaman, gaano man karaming leverage o pulley ang ginamit, may mga limitasyon sa bilis at lakas na maaaring makamit ng lakas ng tao o hayop.
Ang Rebolusyong Industriyal na naganap mula huling bahagi ng 1700s hanggang 1800s ay nagdulot ng malalaking pagbabago sa ganitong uri ng kapangyarihan.
Lumitaw ang steam engine, na may lakas na higit na mas malakas kaysa sa mga tao o hayop, at naitatag ang mga industriya ng makinarya na nakabase sa pabrika. Ito ay humantong sa pagbabago sa istrukturang panlipunan mula sa isang lipunang agrikultural patungo sa isang industriyal. Bukod pa rito, ang pag-unlad ng mga steam locomotive, mga steam automobile, at mga steamship ay nagdulot ng malalaking pagbabago sa transportasyon at logistik. Gayunpaman, ang mga steam engine ay may disbentaha ng pagiging malaki at mabigat.
Nagsimulang maghanap ang mga imbentor at mananaliksik ng pinagmumulan ng kuryente upang palitan ang steam engine, at sa panahon ng rebolusyong ito lumitaw ang motor.
Natuklasan ng siyentipikong Briton na si Michael Faraday ang mga prinsipyo ng mga motor at generator noong 1821. Natuklasan niya ang batas ng electromagnetic induction noong 1831, na kalaunan ay inilapat sa mga motor.
Pagkatapos ni Faraday, ang DC motor (direct current motor) ay binuo nina Thomas Davenport at iba pa sa Estados Unidos, ngunit mahirap itong gamitin sa praktikal na paraan.
Ang unang praktikal na motor ay malamang na ang two-phase AC induction motor na naimbento ni Nikola Tesla. Noong 1888, bumuo si Tesla ng isang polyphase induction generator upang patakbuhin ang motor na kanyang naimbento, at nakakuha ng patente para dito noong 1889. Ito ang nagmarka ng simula ng praktikal na paggamit ng mga motor.
Simula noon, ang mga motor ay patuloy na umunlad, na gumaganap bilang hindi lamang pinagmumulan ng kuryente kundi pati na rin bilang isang aparatong pangkontrol. Sinasabing 50% ng kuryenteng kinokonsumo sa Japan ngayon ay mula sa mga motor. Ganito kalalim ang pagkakasangkot ng mga motor sa buhay ng tao at naging pundasyon ng sibilisasyon.
Ang kasaysayan ng SANYO DENKI CO., LTD. sa larangan ng motor ay nagsimula pa noong unang kalahati ng ika-20 siglo.
Una, noong 1932, nakabuo sila ng isang generator na may parehong pangunahing istraktura gaya ng motor para magamit sa mga kagamitan sa komunikasyon sa radyo. Noong 1952, inilipat nila ang mga umiikot na makinang ginagawa nila para sa mga suplay ng kuryente para sa komunikasyong militar patungo sa paggamit ng sibilyan, SANYO DENKI CO., LTD. ay naging isang pangunahing tagagawa sa larangan ng telekomunikasyon at mga suplay ng kuryente.
Noong 1952, nakatanggap ang Sanyo Denki ng kahilingan mula sa Electrical Testing Laboratory (ngayon ay National Institute of Advanced Industrial Science and Technology) na bumuo ng servo motor, at sinimulan ang pananaliksik. Hindi nagtagal ay natapos nila ang unang servo motor na ginawa sa loob ng bansa ng Japan. Sa una, hindi gaanong demand gaya ng inaasahan, at medyo natagalan bago ito lumabas, ngunit ito ang naging pundasyon ng kasalukuyang SANYO DENKI CO., LTD., na ang pangunahing produkto ay mga servo motor.
Matapos makumpleto ang servo motor, natapos din namin ang unang stepping motor na ginawa sa loob ng bansa at ang unang fan na ginawa sa loob ng bansa. Habang binubuo ang mga produktong "una sa Japan", sinabayan namin ang alon ng OA (office automation) at FA (factory automation) at pinalawak ang aming hanay ng mga motor sa buong mundo.
Ang mga motor ay karaniwang umiikot sa pamamagitan ng paggamit ng "katangian ng magkabilang polo na nag-aakit sa isa't isa" at "katangian ng magkatulad na polo na nagtataboy sa isa't isa" ng mga magnet.
Halimbawa, isipin ang isang maliit na motor na ginagamit sa mga sasakyang kontrolado ng radyo, atbp. Sa loob ng maliit na motor ay isang coil na may umiikot na baras at mga permanenteng magnet na may mga north at south pole na nakaayos sa magkabilang gilid nito.
Kapag ang kuryente ay dumaan sa motor, ang coil ay nagiging isang electromagnet. Mas madaling maunawaan kung iisipin mo ang coil na nagiging isang magnet na may north pole at south pole.
Bilang resulta, ang north pole ng permanenteng magnet at ang north pole ng coil ay nagtataboy sa isa't isa, at ang south pole ng permanenteng magnet at ang south pole ng coil ay nagtataboy sa isa't isa. Kasabay nito, nangangahulugan din ito na ang north pole ng permanenteng magnet at ang south pole ng coil ay nag-aakit sa isa't isa, at ang south pole ng permanenteng magnet at ang north pole ng coil ay nag-aakit sa isa't isa.
Ito ang nagiging sanhi ng pag-ikot ng coil ng 180 degrees sa paligid ng axis ng pag-ikot nito.
Gayunpaman, ito lamang ay magiging sanhi ng paghinto ng coil pagkatapos umikot ng 180 degrees. Ito ay dahil ang north pole ng permanent magnet at ang south pole ng coil ay naaakit sa isa't isa, at ang south pole ng permanent magnet at ang north pole ng coil ay nananatiling naaakit sa isa't isa. Paano natin ito paiikutin ng isa pang 180 degrees, upang ang axis ng pag-ikot ay umikot ng 360 degrees?
Samakatuwid, sa pamamagitan ng pagpapalit ng direksyon ng kuryenteng dumadaloy sa coil, ang posisyon ng mga polo ng hilaga at timog ay napapalitan.
Sa estadong nakatigil na nabanggit kanina, ang north pole ng permanenteng magnet ay umaakit sa south pole ng coil, at ang south pole naman ng permanenteng magnet ay umaakit sa north pole ng coil. Ang direksyon ng kuryenteng dumadaan sa mga brush ay binabago ng isang bahaging tinatawag na "commutator," na nagpapalit ng north at south pole ng coil.
Pagkatapos, ang north pole ng permanenteng magnet at ang north pole ng coil ay nagtataboy sa isa't isa, at ang south pole ng permanenteng magnet at ang south pole ng coil ay nagtataboy sa isa't isa. Kasabay nito, ang north pole ng permanenteng magnet at ang south pole ng coil ay nag-aakit sa isa't isa, at ang south pole ng permanenteng magnet at ang north pole ng coil ay nag-aakit sa isa't isa. Ito ay nagiging sanhi ng pag-ikot ng coil ng isa pang 180 degrees. Ito ngayon ay umikot na ng 360 degrees.
Ang motor ay patuloy na umiikot sa pamamagitan ng pag-uulit ng seryeng ito ng mga paggalaw.
Mula rito, ipakikilala natin ang "mga motor bilang pinagmumulan ng kuryente" at "mga motor bilang mga aparatong pangkontrol."

Ang mga motor na nagpapagana ng mga kagamitan at aparato ay maaaring hatiin sa dalawang pangunahing uri depende sa suplay ng kuryente: mga DC motor at mga AC motor.
Ang "DC motor" ay isang motor na tumatakbo sa direktang kuryente.
Ginagamit ito sa iba't ibang uri ng bagay, mula sa mga kagamitang elektrikal na ginagamit natin araw-araw hanggang sa mga kagamitang ginagamit sa mga pabrika.
Mayroong dalawang uri ng DC motor: "brushed DC motors" at "brushless DC motors." Ang mga brush ay mga bahaging nagpapadala ng kuryente sa coil.
Ang isang brushed DC motor ay may coil sa loob at isang permanenteng magnet sa labas, at pinapaikot ang rotor (umiikot na baras) sa pamamagitan ng pagpasa ng direktang kuryente sa mga brush. Ito ang motor na unang ipinakilala ang simpleng mekanismo, at ginagamit sa mga sasakyan at modelo na kontrolado ng radyo.
Ang motor na ito ay may bentahe na ang bilis ng pag-ikot nito ay tumataas kasabay ng boltahe.
Halimbawa, kung gumagamit ka ng brushed DC motor na may mga baterya, mas mabilis itong iikot kapag dalawang baterya ang nakakonekta kaysa kapag isa ang nakakonekta. Gayunpaman, dahil ang mga carbon brush ay palaging nakadikit sa commutator, na nagbabago sa direksyon ng kuryenteng dumadaloy sa coil, masisira ang mga ito pagkatapos ng mahabang panahon ng operasyon, kaya kinakailangan ang regular na pagpapanatili.
Sa kabilang banda, ang isang brushless DC motor (BLDC motor) ay may permanenteng magnet sa loob at isang coil sa labas, at ang panloob na permanenteng magnet ay umiikot kapag ang kuryente ay dumaan sa coil sa pamamagitan ng isang current control circuit.
Ang kawalan ng mga brush ay hindi lamang nakakabawas sa dalas ng pagpapanatili, kundi nagbibigay-daan din sa paggamit sa malinis na kapaligiran dahil walang mga dumi mula sa mga brush. Gayunpaman, kinakailangan ang isang circuit upang kontrolin ang direksyon ng kuryente sa labas ng motor, na ginagawang mas mahal ito kaysa sa isang brushed DC motor.
| Uri ng Motor |
merito | Mga Disbentaha |
|---|---|---|
| Motor na may brush na DC | Mababang gastos | Mabilis ang pagkasira |
| Motor na walang brush na DC | mahabang buhay | Mataas na gastos |
Ang "AC motor" ay isang motor na tumatakbo sa alternating current. Mayroon itong panlabas na coil at panloob na rotor na "squirrel-cage".
Ang bentahe ng mga AC motor ay hindi sila nangangailangan ng mga commutator, brush, o control circuit. Dahil simple ang istruktura ng mga ito at maaaring gawin sa mababang halaga, ginagamit ang mga ito sa iba't ibang aplikasyon, kabilang ang mga kagamitan sa bahay tulad ng mga electric fan at vacuum cleaner, water pump, conveyor, at kagamitang pang-industriya.
Ang mga karaniwang halimbawa ng mga motor na ginagamit upang tumpak na kontrolin ang operasyon ng mga aparato at kagamitan ay ang mga stepping motor at servo motor.
Ang stepping motor ay isang motor kung saan ang rotor ay umiikot sa isang nakapirming anggulo (posisyon).
Isipin ang isang analog na orasan, na may segundong kamay na gumagalaw nang paisa-isa. Ang mga stepping motor ay maaaring kontrolin upang gumalaw lamang sa isang nakatakdang anggulo tulad nito. Bukod sa mga analog na orasan, ang mga stepping motor ay ginagamit din sa mga printer, air conditioner louver, ATM, ticket vending machine, automatic ticket gate system, at marami pang iba.
Simple lang ang mekanismo para sa pag-ikot ng rotor nang may eksaktong anggulo. Maraming uka ang rotor ng stepper motor. Ang kuryente ay dumadaan sa motor, at kapag naigalaw na ng rotor ang nais na bilang ng mga uka, namamatay ang kuryente. Ito ang nagiging sanhi ng pag-ikot ng rotor nang may eksaktong anggulo at pagkatapos ay humihinto.
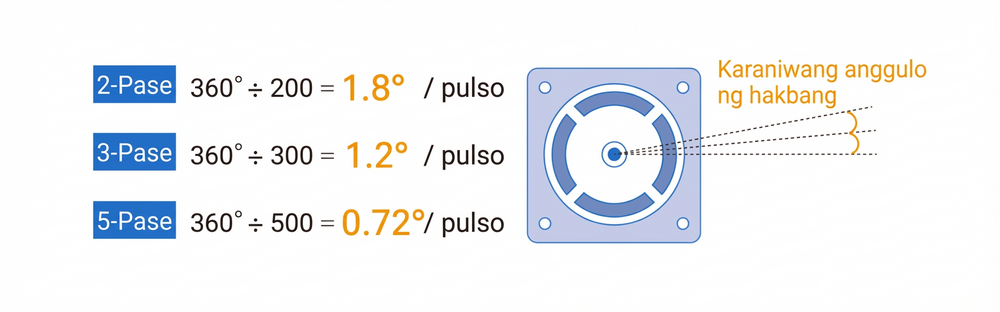
Halimbawa, ang isang two-phase stepping motor sa pangkalahatan ay may 200 uka. Ang isang pag-ikot ng 360 degrees ay hinahati sa 200 bahagi, kaya ang anggulo ng paggalaw sa bawat uka ay 1.8 degrees. Kung gusto mong umikot ang motor ng 18 degrees, idadaan mo ang kuryente sa motor at ititigil ang kuryente kapag ang rotor ay gumalaw na ng katumbas ng 10 uka.
Para makontrol ang isang stepper motor, kailangan mo ng controller. Ang papel ng isang controller ay magpadala ng mga signal sa stepper motor na nagsasabi dito kung gaano kalayo ang dapat igalaw. Una, ipagpalagay natin na ang pag-on at off ng kuryente ay binibilang bilang isang pulso. Kapag ang controller ay nagpadala ng isang one-pulse signal (pulse signal) sa stepper motor, ang rotor ay umiikot sa isang uka at pagkatapos ay humihinto.
Gaya ng sa nakaraang halimbawa, sabihin nating gusto mong paikutin ang isang two-phase stepping motor na may 200 grooves nang 18 degrees. Sa kasong ito, magpapadala ka ng 10-pulse signal mula sa controller. Kapag natanggap ng stepping motor ang signal, ito ay umiikot ng 18 degrees, na katumbas ng 10 grooves, at pagkatapos ay hihinto.
Dahil dito, kinakailangan ang isang controller upang kontrolin ang isang stepping motor.

Tulad ng mga stepper motor, ang mga servo motor ay mga motor na idinisenyo upang paikutin ang isang rotor sa nais na anggulo. Gayunpaman, may mga malinaw na pagkakaiba sa pagitan ng mga servo motor at mga stepper motor.
Walang mga uka ang mga rotor ng servo motor, kaya walang restriksyon sa pag-ikot ng rotor sa 1.8 digri na pagtaas. Kung gagamit ng high-resolution sensor, maaaring ihinto ang rotor sa isang eksaktong anggulo na isang milyon ng isang digri.
Kinakailangan ang mga sensor para sa kontrol na ito. Sa isang servo motor, tumpak na nade-detect ng mga sensor na ito ang posisyon ng pag-ikot ng rotor, na nagpapahintulot dito na huminto sa nilalayong anggulo. Bukod pa rito, patuloy na minomonitor ng mga sensor ang motor kahit na huminto na ito, at kung lumihis ang anggulo ng paghinto, awtomatikong itinatama ito agad ng kontrol.
Sa itaas, ipinakilala namin ang papel at mga uri ng motor, ang kanilang kasaysayan, mga prinsipyo ng pagpapatakbo, at istruktura.
Ang pag-unawa sa mga katangian ng mga motor ay hahantong sa pinakamainam na pagpili ng motor at pinahusay na pagganap ng kagamitan.
SANYO DENKI CO., LTD. ay humahawak ng iba't ibang uri ng motor. Kung mayroon kang anumang mga katanungan tungkol sa pagpili ng motor, mangyaring makipag-ugnayan sa amin.
Petsa ng paglabas:



Layuning maging No. 1 sa mundo sa pagmamanupaktura

Mga kakayahang teknikal na nagbibigay-daan sa advanced na pagpapasadya

Malapit na ang ika-100 anibersaryo natin

Pandaigdigang Network

