Kiến thức
[Các loại và tính năng] Động cơ bước là gì? Cơ chế và các loại



Động cơ bước là một loại động cơ điều khiển di chuyển và quay theo các góc cố định giống như đồng hồ bằng cách chuyển pha mà dòng điện chạy qua. Định vị có thể được thực hiện mà không cần cảm biến. Đôi khi nó còn được gọi là động cơ xung, động cơ bước, động cơ bước, v.v.
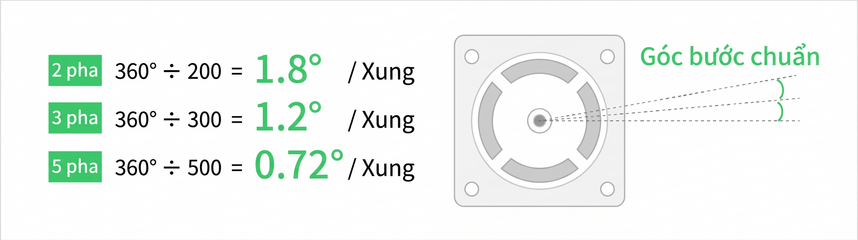
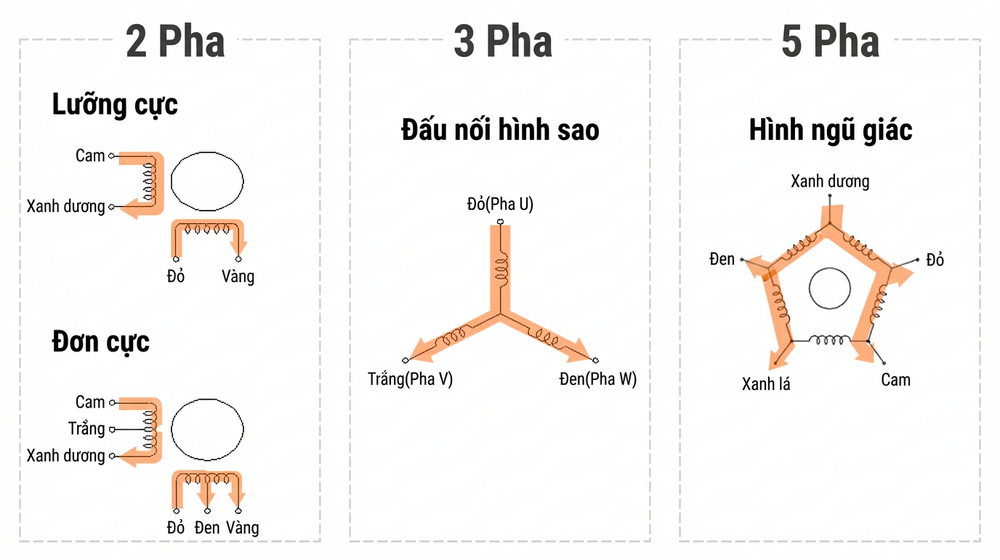
Động cơ bước được phân thành 2 pha, 3 pha và 5 pha tùy theo cấu tạo của chúng.
Đối với động cơ bước quay giống như đồng hồ, góc có thể di chuyển được bằng một xung được gọi là "góc bước tiêu chuẩn". Góc bước tham chiếu càng mịn thì chuyển động càng mượt mà và chính xác hơn.

Cần có người lái để điều khiển động cơ bước. Khi tạo trình điều khiển, xin lưu ý rằng trong trường hợp hai pha, mạch điều khiển của trình điều khiển sẽ khác nhau tùy thuộc vào đó là ổ đĩa lưỡng cực hay ổ đĩa đơn cực. 3 pha và 5 pha yêu cầu bộ điều khiển có thể truyền dòng điện theo cả hai hướng.
Ngoài ra, động cơ bước 2 pha và 3 pha có cấu trúc cuộn dây đơn giản nên ngay cả khi động cơ được sản xuất bởi các nhà sản xuất khác nhau thì chúng vẫn có thể quay được bởi cùng một mạch truyền động. Tuy nhiên, trong trường hợp động cơ bước 5 pha, cấu trúc cuộn dây rất phức tạp và sự kết hợp cũng như thứ tự của các pha chảy để quay động cơ là khác nhau. Vì vậy, trong trường hợp động cơ bước 5 pha, phải cẩn thận khi chọn bộ điều khiển để kết hợp.
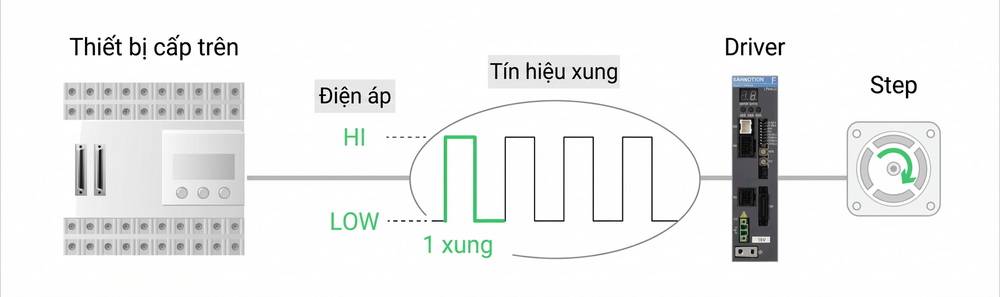
Đầu tiên, liên quan đến tín hiệu lệnh xung, đây là tín hiệu điện liên tục BẬT/TẮT điện áp (HI/LOW). Một chu kỳ HI/LOW được tính là một xung.
Tín hiệu xung được đưa vào trình điều khiển từ bộ điều khiển máy chủ, v.v. và góc quay được điều khiển bởi số lượng tín hiệu xung.
Điều khiển tốc độ động cơ bước
Tốc độ quay được điều khiển bởi mật độ số xung. Nếu một xung quay một góc bước tham chiếu, việc gửi 10 xung mỗi giây sẽ dẫn đến góc quay mỗi giây lớn hơn so với việc gửi một xung mỗi giây. Do đó, tần số xung càng cao thì tốc độ quay càng nhanh.
Điều khiển vị trí động cơ bước
Các trình điều khiển gần đây đã bắt đầu áp dụng phương pháp vi bước, cho phép kiểm soát tốt hơn lượng dòng điện chạy qua các pha và định vị ở một góc nhỏ hơn góc bước tiêu chuẩn của động cơ, cho phép điều khiển vị trí chính xác hơn.
Ưu điểm 1: Dễ dàng điều khiển
Nó có thể được bật dễ dàng bằng cách bật và tắt bóng bán dẫn của trình điều khiển một cách chính xác. Tốc độ quay cũng có thể dễ dàng tăng lên bằng cách tăng tốc thời gian BẬT/TẮT.
Ưu điểm 2: Có thể đơn giản hóa hệ thống
Động cơ có thể được điều khiển dễ dàng bằng cách sử dụng các xung và tần số đầu vào cho trình điều khiển, do đó không cần bộ điều khiển phức tạp. Ngoài ra, tính năng quan trọng nhất của động cơ bước là vị trí và tốc độ có thể được kiểm soát mà không cần máy dò, giúp đơn giản hóa hệ thống.
Ưu điểm 3: Có thể xây dựng hệ thống giá rẻ
Trình điều khiển đơn giản và không yêu cầu máy dò, đồng thời hệ thống có thể được xây dựng với chi phí thấp do không yêu cầu bộ điều khiển phức tạp.
Ưu điểm 4: Có thể dừng ổn định
Động cơ bước là động cơ sử dụng lực từ để dừng động cơ nên tạo ra lực dừng (giữ mô-men xoắn) cho phép động cơ dừng ổn định.
Mặc dù động cơ bước không được nhìn thấy trực tiếp trong cuộc sống hàng ngày của chúng ta nhưng chúng hoạt động trong nhiều máy móc hỗ trợ cuộc sống của chúng ta trong nhiều tình huống khác nhau. Nó thực sự được sử dụng ở đâu? Ví dụ điển hình là những công dụng sau.
Để biết thêm thông tin, vui lòng xem "Động cơ bước là gì? Các ứng dụng và ví dụ sử dụng động cơ bước."
Cảnh báo 1: Bạn sẽ bị lạc bước
Không cần có cảm biến, nhưng vì vị trí không được kiểm tra nên bạn sẽ không nhận thấy nếu nó không di chuyển theo lệnh (bước ra). So với động cơ servo được điều khiển theo vòng kín, chúng kém tin cậy hơn.
Cảnh báo 2: Sốt cao
Mô-men xoắn giữ được tạo ra ngay cả khi dừng, tạo ra nhiệt.
Cảnh báo 3: Rung
Một động cơ quay theo một góc cố định sẽ luôn rung khi nó di chuyển, từng bước một, giống như khi lên xuống cầu thang.
| động cơ bước | Động cơ servo | |||
| điều khiển | vòng lặp mở | vòng khép kín | ||
| mô-men xoắn | Không có máy dò | Luôn tạo ra một mô-men xoắn không đổi theo hướng dừng động cơ. | máy dò dòng điện động cơ | Điều khiển dòng điện động cơ theo hướng quay động cơ để tạo ra mô-men xoắn yêu cầu. |
| Tốc độ quay | Không có máy dò | Quay với tốc độ đồng bộ với tần số xung đầu vào. Nếu bạn không thể đồng bộ hóa, bạn sẽ bị lạc nhịp. | máy dò tốc độ động cơ | Di chuyển đồng thời kiểm tra tốc độ động cơ để động cơ quay theo tốc độ yêu cầu. |
| vị trí (góc) | Không có máy dò | Di chuyển theo lượng xung đầu vào. Nếu không di chuyển kịp thời, bạn sẽ bị lạc nhịp. | máy dò vị trí động cơ | Di chuyển trong khi kiểm tra vị trí động cơ để đạt được vị trí mục tiêu đã chỉ huy. |
| Đặc trưng | Giá rẻ và dễ sử dụng, tốc độ thấp và mô-men xoắn cao | Mặc dù đắt tiền nhưng nó có nhiều chức năng khác nhau và có mô-men xoắn cao ở tốc độ cao. | ||
| ma sát | Có thể định vị nhanh chóng và chính xác ngay cả khi có độ ma sát cao. | Có thể định vị chính xác nhưng sẽ mất thời gian nếu lực ma sát lớn. | ||
| Cộng hưởng/rung động | Tốc độ gợn sóng lớn và động cơ không thể ngăn chặn sự cộng hưởng. | Hiện tượng gợn sóng tốc độ và cộng hưởng có thể bị triệt tiêu bằng cách sử dụng các chức năng của trình điều khiển. | ||
| Tỷ lệ quán tính | Nếu quán tính lớn thì không thể điều khiển được động cơ. | Động cơ có thể được điều khiển ngay cả khi tỷ lệ quán tính lớn. | ||
| Kĩ năng đặc biệt sử dụng hợp lý |
Giữ nguyên vị trí. | Để xoay ổn định (không rung hoặc tiếng ồn). | ||
| Tốc độ thấp, hoạt động khởi động/dừng khoảng cách ngắn. | Hoạt động khởi động và dừng tốc độ cao, tốc độ cao. | |||
| Gia công nhẹ nhàng. | Gia công chính xác, gia công nặng. | |||
ngày phát hành:



Sản xuất đặt mục tiêu số 1 thế giới

Khả năng kỹ thuật cho phép tùy chỉnh nâng cao

sắp kỷ niệm 100 năm

mạng lưới toàn cầu