解決事例
對再生醫學的建議-我想實現遠程操作的移液器機械人
為該專案做出貢獻的山洋電氣的專業知識和共同創造業務
建築業 (8500名員工)



|
尊敬的大成建設株式會社: 業務內容 建築土木工程 URL
|
|
尊敬的軟銀公司: 業務內容 通信服務 URL
|
大型建築承包商大成建設 (Taisei Construction) 設立了新技術開發項目,開始開發面向“生產設施 (醫藥品、食品工廠等) 省人化”的新概唸“遠程操作係統”。
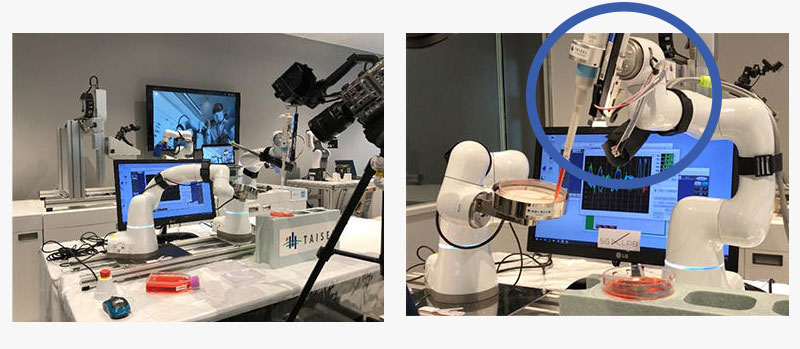
作為其中的一環,大成建設與軟銀共同開發並驗證了利用5G遠程操作細胞培養用移液管機械人的係統。
移液管作業是指對微量液體進行吸引、排出、計量,因此必須避免對細胞等造成損害。因此,遠程操作要求機械臂能夠無延遲地進行精密動作。但是,由於前所未有的嘗試,存在許多技術障礙。
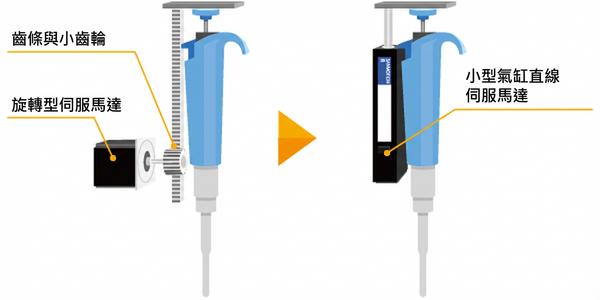
首先,為了將操作方的動作傳達給遠程機械人,需要正確獲取操作方的位置信息。另外,由於最初考慮在遠端的機械手上配備旋轉型伺服馬達,因此需要配備用於將旋轉動作轉換為直線動作的“齒軌及齒輪機構”。但是,由於設備變大,因此需要改進。另外,由於操作端和遠端的動作不能產生延遲,因此必須控制在人感覺不到偏差的範圍內 (0.2秒以內) 。
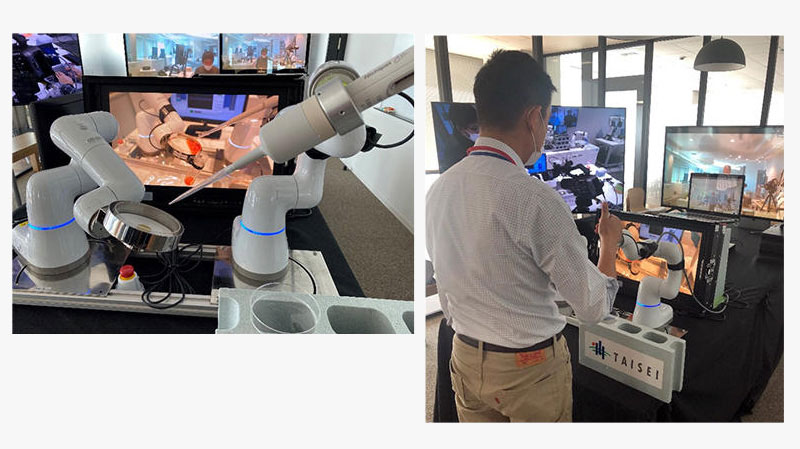
【操作側 (東京) 】
【細胞培養器具的設置側 (大阪) 】
圖片提供:大成建設
為了解決這些問題,山洋電氣作為伺服馬達製造商建構了支援體系,並基於在FA系統中累積的專業知識提出了多種解決方案。

利用5G成功進行遠端移液-為實現這項前所未有的壯舉,與大成工業株式會社共同建設5G網路的軟銀,與山洋電氣、醫療及科學設備製造商日菱電機以及電氣控制公司松浦電工社進行了聯繫,將各自的技術結合起來,繼續開發機器人。
為了解決從操作員那裡獲取位置資訊的問題,山洋電氣首先向移液器製造商日菱提供了編碼器本身及其安裝技術。
接著,還提議將用於遠端手臂驅動的旋轉型伺服馬達更換為小型氣缸線性伺服馬達。該直線伺服馬達的寬度尺寸為12mm,卻能產生額定推力5.1N的大推力,完全達到了所要求的扭矩 (推動移液管彈簧的力) 。另外,由於內置了線性編碼器 (光學式增量) 和線性導軌,因此完全取消了齒軌及齒輪機構。有了這個提議,遠程機制變得簡單而纖薄。
我們還建議使用 EtherCAT 進行高速通信,以最大限度地減少操作端和遠端之間的延遲。結果,我們成功地將操作員的工作透過 DC48 EtherCAT R 放大器準確地傳輸到遠端圓柱型直線電機,並且沒有任何明顯的延遲(0.03 秒)。
此外,我們也成功地量化了檢查移液管操作時的手動作業。這帶來了人工智慧學習等進一步創新的可能性。
就這樣,多家公司在大成集團和軟銀的專案下走到了一起,解決了一個又一個技術難題。
2021年3月,大成電氣與軟銀在東京和大阪之間進行了使用5G和4K顯示器的遠端控制演示。我們能夠成功進行遠程移液。可以說,這項複雜實驗的成功歸功於各公司能夠建立的共同創造關係。
山洋電氣將繼續利用在建構FA系統方面累積的專業技術,為創造新業務做出貢獻。
大成公司發表文章 最新消息
成功使用 5G 和機器人手臂遠端控制細胞培養移液器工作 | 大成工業株式會社 (taisei.co.jp)
我公司資訊發表的文章
我公司的小型汽缸直線伺服馬達被大成公司的「細胞培養移液器操作遠端控制系統」採用
發布日期:

以世界No.1為目標的產品制造

高級定制的技術能力

馬上創業100年

全球網路