山洋小教室
【種類與特點】 什麽是步進電機?結構/類型



步進馬達是控制馬達的一種,通過切換電流流動相,像鐘表一樣以一定角度移動並旋轉。無需感測器即可定位。有時也稱為脈衝馬達、步進、步進馬達等。
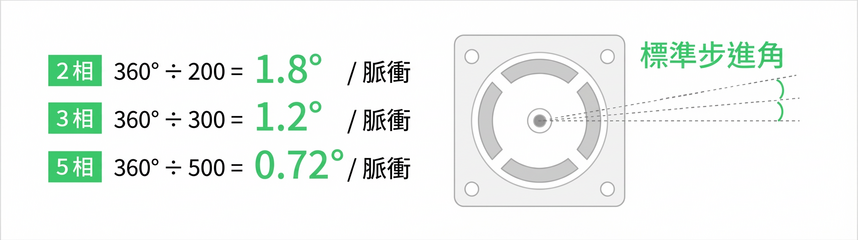
步進馬達依結構分為2相、3相、5相。
對於像時鐘一樣旋轉的步進馬達來說,一個脈衝所能移動的角度稱為「標準步距角」。參考步距角越細,運動越平滑越精確。

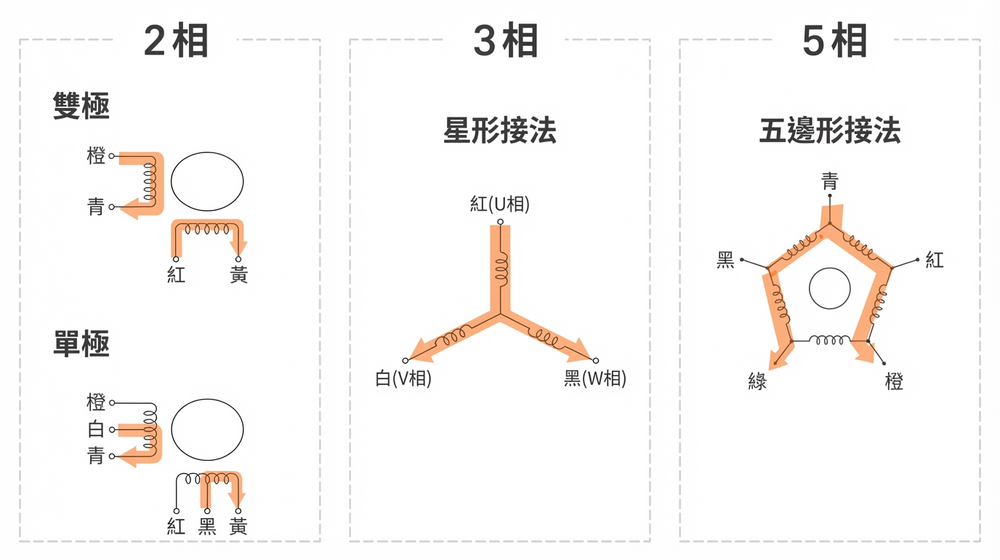
驅動步進電機需要驅動器。制作驅動器時需要註意的是,在2相的情況下,根據是雙極驅動還是單極驅動,驅動器的驅動電路會有所不同。3相和5相需要能夠雙向傳輸電流的驅動器。
另外,2相及3相步進馬達由於繞組結構簡單,因此即使廠商不同,也可利用相同的驅動電路轉動馬達。但是,5相步進電機的繞組結構復雜,轉動電機所需的相的組合和順序也不是一套。因此,對於5相步進電機,需要註意配套的驅動器。
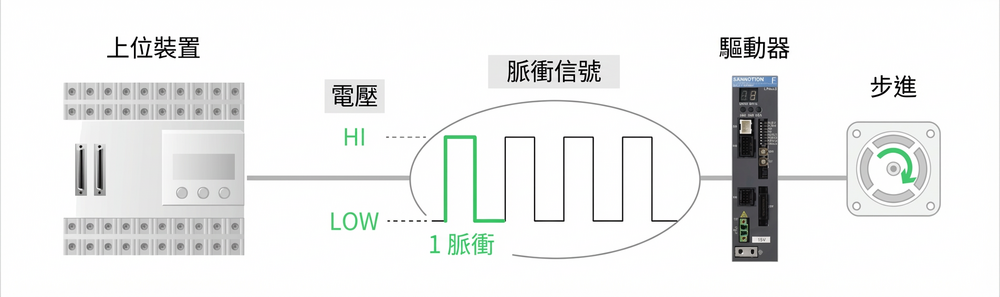
首先,脈衝指令訊號是重複接通/斷開電壓(HI/LOW)的電訊號。 HI/LOW 的一個週期算一個脈衝。
從上位控制器等向驅動器輸入脈衝訊號,透過脈衝訊號的數量來控制旋轉角度。
步進電機的速度控制
轉速由脈衝數的密度控制。1個脈衝旋轉1個基準階躍角時,1秒發送10個脈衝比1秒發送1個脈衝旋轉1秒的角度大。因此,脈衝頻率越高,旋轉速度越快。
步進電機的位置控制
最近的驅動器開始採用微步進方式,通過精細控制相中流過的電流量,能夠以小於馬達基準步進角的角度進行定位,能夠進行更精細的位置控制。
優勢1:易於控制
只需正確打開/關閉驅動器的晶體管即可輕松轉動。只需加快開/關時間即可輕松提高轉速。
優勢2:簡化係統
由於可利用輸入驅動器的脈衝及其頻率輕松控制馬達,因此無需復雜的控制器。另外,通過步進電機的最大特點“無需檢測器即可控制位置和速度”,可簡化係統。
優勢3:構建成本低廉的係統
由於驅動程序簡單且不需要探測器並且不需要復雜的控制器,因此可以廉價地構建係統。
優勢4:穩定停機
由於步進馬達是利用磁力使馬達停止的,因此會產生停止力 (保持扭矩),因此能夠穩定停止。
步進電機雖然在日常生活中不能直接接觸到我們的眼睛,但卻在許多“機器中”工作,在各種場景中支持著我們的生活。它實際上用於哪裡?典型的例子如下。
欲了解更多信息,請查看“什麼是步進電機?步進電機的應用和使用示例”。
註意點1:失調
雖然不需要感測器,但由於沒有確認位置,即使沒有按照指令移動 (失調) 時也不會註意到。與採用閉環控制的伺服馬達相比,可靠性較低。
註意事項2:高熱
由於在停止過程中也會產生保持扭矩,因此會發熱。
註意事項3:振動
每隔一定角度旋轉的馬達,由於是像上下樓梯一樣一段一段地移動,因此移動時肯定會產生振動。
| 步進電動機 | 伺服馬達 | |||
| 控制 | 開環 | 閉環 | ||
| 轉矩 | 無探測器 | 在停止馬達的方向上,始終產生一定的扭矩。 | 電動機電流檢測器 | 通過在馬達旋轉方向上控制馬達電流,產生指令扭矩。 |
| 轉速 | 無探測器 | 以與輸入脈衝頻率同步的速度旋轉。如果不能同步就會失調。 | 馬達速度檢測器 | 在確認馬達速度的同時進行移動,以便以指令速度旋轉馬達。 |
| 位置 (角度) | 無探測器 | 移動輸入的脈衝。如果來不及移動就會失調。 | 馬達位置檢測器 | 為了達到指令的目標位置,在確認馬達位置的同時進行移動。 |
| 特徵 | 價格便宜、使用方便、低速大扭矩 | 價格昂貴但功能多樣,扭矩更高 | ||
| 摩擦 | 即使摩擦較大,也可快速準確地定位。 | 可實現精密定位,但如果摩擦較大則需要時間。 | ||
| 共振振動 | 速度紋波較大,無法利用馬達抑制共振。 | 可利用驅動器的功能抑制速度波動和共振。 | ||
| 慣量比 | 如果慣量較大,則無法控制馬達。 | 即使慣性比較大,也可控制馬達。 | ||
| 我擅長什麼 正確使用 |
保持相同的位置。 | 穩定 (無振動和噪音) 旋轉。 | ||
| 低速、短距離的起動停止動作。 | 高速、高加速度的起動停止動作。 | |||
| 輕加工動作。 | 精密加工、重加工動作。 | |||
發布日期:

以世界No.1為目標的產品制造

高級定制的技術能力

馬上創業100年

全球網路