

ज्ञान
[प्रकार और विशेषताएँ] स्टेपिंग मोटर क्या है? तंत्र और प्रकार



स्टेपिंग मोटर एक प्रकार की नियंत्रण मोटर है जो चरण को स्विच करके घड़ी की तरह निश्चित कोण वृद्धि में चलती और घूमती है जिसके माध्यम से वर्तमान प्रवाह होता है। पोजिशनिंग बिना सेंसर के की जा सकती है। इसे कभी-कभी पल्स मोटर, स्टेप मोटर, स्टेपर मोटर आदि भी कहा जाता है।
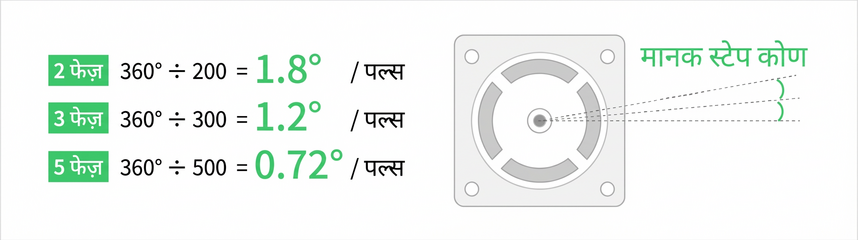
स्टेपिंग मोटर्स को उनकी संरचना के आधार पर 2-चरण, 3-चरण और 5-चरण में वर्गीकृत किया गया है।
एक स्टेपिंग मोटर के लिए जो घड़ी की तरह घूमती है, वह कोण जिसे एक पल्स के साथ घुमाया जा सकता है उसे "मानक स्टेप एंगल" कहा जाता है। संदर्भ चरण कोण जितना महीन होगा, गति उतनी ही सहज और अधिक सटीक होगी।

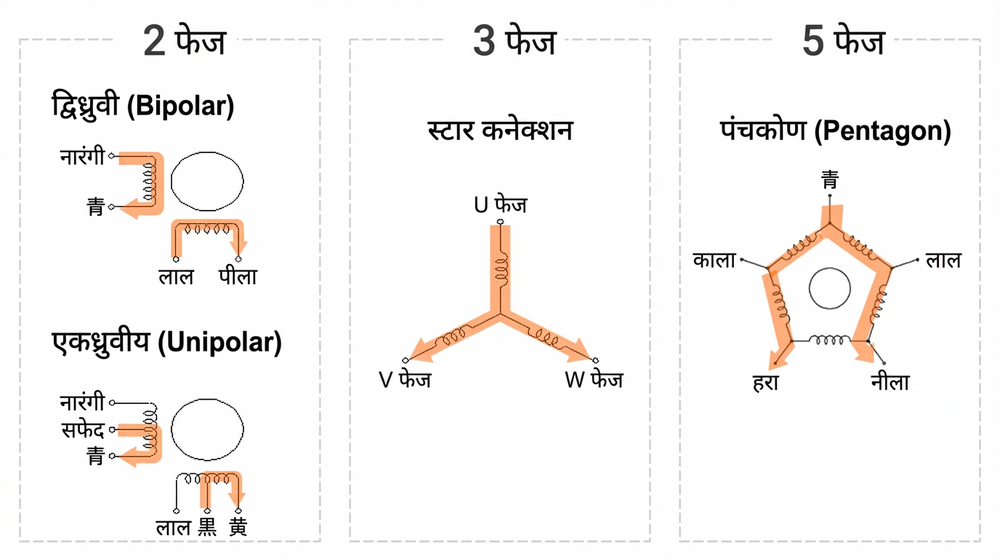
स्टेपिंग मोटर चलाने के लिए ड्राइवर की आवश्यकता होती है। ड्राइवर बनाते समय, कृपया ध्यान रखें कि दो-चरण के मामले में, ड्राइवर का ड्राइव सर्किट इस पर निर्भर करेगा कि यह द्विध्रुवी ड्राइव है या एकध्रुवीय ड्राइव है। 3-चरण और 5-चरण के लिए ऐसे ड्राइवर की आवश्यकता होती है जो दोनों दिशाओं में धारा प्रवाहित कर सके।
इसके अतिरिक्त, 2-चरण और 3-चरण स्टेपिंग मोटरों में सरल घुमावदार संरचनाएं होती हैं, इसलिए भले ही मोटरें विभिन्न निर्माताओं द्वारा बनाई गई हों, उन्हें एक ही ड्राइव सर्किट द्वारा घुमाया जा सकता है। हालाँकि, 5-चरण स्टेपिंग मोटर के मामले में, घुमावदार संरचना जटिल है, और मोटर को घुमाने के लिए पारित चरणों का कोई एकल संयोजन या क्रम नहीं है। इसलिए, 5-चरण स्टेपिंग मोटर के मामले में, संयुक्त करने के लिए ड्राइवर का चयन करते समय सावधानी बरतनी चाहिए।
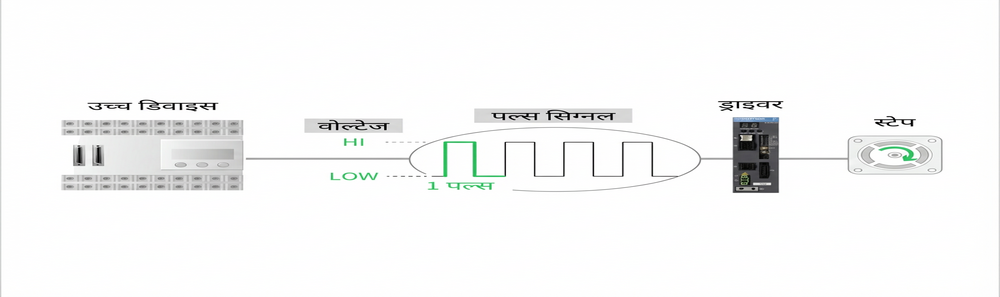
सबसे पहले, पल्स कमांड सिग्नल के संबंध में, यह एक विद्युत सिग्नल है जो बार-बार वोल्टेज को चालू/बंद (HI/LOW) करता है। HI/LOW के एक चक्र को एक पल्स के रूप में गिना जाता है।
पल्स सिग्नल एक मेजबान नियंत्रक आदि से ड्राइवर को इनपुट होते हैं, और रोटेशन कोण को पल्स सिग्नल की संख्या द्वारा नियंत्रित किया जाता है।
स्टेपिंग मोटर गति नियंत्रण
घूर्णन गति को दालों की संख्या के घनत्व द्वारा नियंत्रित किया जाता है। यदि एक पल्स एक संदर्भ चरण कोण को घुमाता है, तो प्रति सेकंड 10 पल्स भेजने से प्रति सेकंड एक पल्स भेजने की तुलना में प्रति सेकंड बड़ा रोटेशन कोण होगा। इसलिए, पल्स आवृत्ति जितनी अधिक होगी, घूर्णन गति उतनी ही तेज होगी।
स्टेपिंग मोटर स्थिति नियंत्रण
हाल के ड्राइवरों ने माइक्रोस्टेप विधि को अपनाना शुरू कर दिया है, जो चरणों के माध्यम से प्रवाहित होने वाली धारा की मात्रा को बेहतर ढंग से नियंत्रित करने और मोटर के मानक स्टेप कोण से छोटे कोण पर स्थिति निर्धारित करने की अनुमति देता है, जिससे अधिक सटीक स्थिति नियंत्रण की अनुमति मिलती है।
लाभ 1: नियंत्रण में आसान
इसे ड्राइवर के ट्रांजिस्टर को सही ढंग से चालू और बंद करके आसानी से चालू किया जा सकता है। केवल चालू/बंद समय को तेज करके रोटेशन की गति को भी आसानी से बढ़ाया जा सकता है।
लाभ 2: सिस्टम सरलीकरण संभव
ड्राइवर को पल्स और फ़्रीक्वेंसी इनपुट का उपयोग करके मोटर को आसानी से नियंत्रित किया जा सकता है, इसलिए एक जटिल नियंत्रक की आवश्यकता नहीं है। इसके अतिरिक्त, स्टेपिंग मोटर्स की सबसे महत्वपूर्ण विशेषता यह है कि स्थिति और गति को डिटेक्टर के बिना नियंत्रित किया जा सकता है, जिससे सिस्टम को सरल बनाना संभव हो जाता है।
लाभ 3: सस्ता सिस्टम निर्माण संभव
ड्राइवर सरल है और उसे डिटेक्टर की आवश्यकता नहीं है, और सिस्टम का निर्माण कम लागत पर किया जा सकता है क्योंकि इसमें जटिल नियंत्रक की आवश्यकता नहीं होती है।
लाभ 4: स्थिर रोक संभव
स्टेपिंग मोटर एक मोटर है जो मोटर को रोकने के लिए चुंबकीय बल का उपयोग करती है, इसलिए यह एक रोकने वाला बल (टोक़ पकड़ने वाला) उत्पन्न करती है जो इसे स्थिर स्टॉप पर आने की अनुमति देती है।
हालाँकि स्टेपिंग मोटर सीधे हमारे दैनिक जीवन में नहीं देखी जाती हैं, वे कई मशीनों में काम करती हैं जो विभिन्न स्थितियों में हमारे जीवन का समर्थन करती हैं। वास्तव में इसका उपयोग कहां किया जाता है? विशिष्ट उदाहरण निम्नलिखित उपयोग हैं।
अधिक जानकारी के लिए, कृपया "स्टेपिंग मोटर क्या है? स्टेपिंग मोटर के अनुप्रयोग और उपयोग के उदाहरण" देखें।
सावधानी 1: आप कदम से भटक जायेंगे
एक सेंसर की आवश्यकता नहीं है, लेकिन चूंकि स्थिति की जांच नहीं की गई है, इसलिए आप ध्यान नहीं देंगे कि यह कमांड (बाहर कदम) के अनुसार नहीं चल रहा है। बंद लूप में नियंत्रित होने वाली सर्वो मोटरों की तुलना में, वे कम विश्वसनीय हैं।
सावधानी 2: तेज बुखार
रुकने पर भी होल्डिंग टॉर्क उत्पन्न होता है, जिससे गर्मी उत्पन्न होती है।
सावधानी 3: कंपन
एक मोटर जो एक निश्चित कोण पर घूमती है, वह चलते समय हमेशा कंपन करती है, एक समय में एक कदम, जैसे सीढ़ियों से ऊपर और नीचे जाना।
| स्टेपर मोटर | सर्वो मोटर | |||
| नियंत्रण | खुला लूप | बंद लूप | ||
| टॉर्कः | कोई डिटेक्टर नहीं | हमेशा उस दिशा में एक स्थिर टॉर्क उत्पन्न करता है जो मोटर को रोकता है। | मोटर करंट डिटेक्टर | मोटर करंट को उस दिशा में नियंत्रित करता है जो कमांड टॉर्क उत्पन्न करने के लिए मोटर को घुमाता है। |
| घूर्णन गति | कोई डिटेक्टर नहीं | इनपुट पल्स आवृत्ति के साथ सिंक्रनाइज़ गति पर घूमता है। यदि आप समन्वयित नहीं कर सकते, तो आप धुन से भटक जायेंगे। | मोटर गति डिटेक्टर | मोटर की गति की जाँच करते समय आगे बढ़ें ताकि मोटर निर्देशित गति पर घूमे। |
| स्थिति (कोण) | कोई डिटेक्टर नहीं | इनपुट पल्स की मात्रा के अनुसार आगे बढ़ें। यदि आप समय पर नहीं चलते हैं, तो आप अपनी राह से भटक जायेंगे। | मोटर स्थिति डिटेक्टर | निर्देशित लक्ष्य स्थिति तक पहुँचने के लिए मोटर स्थिति की जाँच करते हुए आगे बढ़ें। |
| विशेषताएँ | सस्ता और उपयोग में आसान, कम गति और उच्च टॉर्क | हालांकि महंगा है, इसमें विभिन्न कार्य हैं और उच्च गति तक उच्च टॉर्क है। | ||
| टकराव | बड़े घर्षण के साथ भी त्वरित और सटीक स्थिति संभव है। | सटीक स्थिति निर्धारण संभव है, लेकिन यदि घर्षण बड़ा हो तो इसमें समय लगता है। | ||
| अनुनाद/कंपन | गति तरंग बड़ी है और प्रतिध्वनि को मोटर द्वारा दबाया नहीं जा सकता। | ड्राइवर फ़ंक्शंस का उपयोग करके गति तरंग और अनुनाद को दबाया जा सकता है। | ||
| जड़ता अनुपात | यदि जड़त्व बड़ा है, तो मोटर को नियंत्रित नहीं किया जा सकता है। | जड़त्व अनुपात बड़ा होने पर भी मोटर को नियंत्रित किया जा सकता है। | ||
| मैं किसमें अच्छा हूँ समुचित उपयोग |
वही स्थिति रखें. | स्थिर रूप से घूमने के लिए (कंपन या शोर के बिना)। | ||
| कम गति, कम दूरी की शुरुआत/रोक ऑपरेशन। | उच्च गति, उच्च त्वरण संचालन शुरू और बंद करें। | |||
| लाइट मशीनिंग ऑपरेशन। | परिशुद्धता मशीनिंग, भारी मशीनिंग संचालन। | |||
रिलीज़ की तारीख:



विनिर्माण का लक्ष्य दुनिया में नंबर 1 बनना है

तकनीकी क्षमताएं जो उन्नत अनुकूलन को सक्षम बनाती हैं

जल्द ही 100वीं वर्षगांठ

वैश्विक नेटवर्क

