

ज्ञान
[प्रकार और विशेषताएँ] मोटर क्या है?



मोटर एक उपकरण है जो विद्युत शक्ति से यांत्रिक शक्ति उत्पन्न करता है। इनका उपयोग सभी प्रकार की चलती-फिरती चीजों में किया जाता है, जैसे परिचित घरेलू उपकरणों जैसे वॉशिंग मशीन, बिजली के पंखे और एयर कंडीशनर से लेकर सामाजिक बुनियादी ढांचे से संबंधित वस्तुओं जैसे एटीएम (स्वचालित टेलर मशीन) और स्वचालित टिकट गेट तक।
उस अर्थ में, यह कहा जा सकता है कि आज रहने वाले सभी लोग मोटरों के लाभों से लाभान्वित होते हैं। मोटरों के अलावा, यांत्रिक शक्ति उत्पन्न करने वाले बिजली स्रोतों में इंजन और भाप इंजन शामिल हैं।
हालाँकि, मोटरों में तीन विशेषताएं होती हैं जो अन्य बिजली स्रोतों में नहीं होती हैं।
उदाहरण के लिए, एक सामान्य इंजन की तापीय क्षमता 30 से 40% बताई जाती है। इसका मतलब यह है कि इनपुट ऊर्जा का केवल 30 से 40% ऊर्जा के रूप में उपयोग किया जाता है, और शेष 60 से 70% गर्मी के रूप में बर्बाद हो जाता है।
दूसरी ओर, मोटरों की ऊर्जा रूपांतरण दक्षता 80% से अधिक है। इस प्रकार, एक इंजन की तुलना में, ऊर्जा को बर्बाद किए बिना ऊर्जा में परिवर्तित किया जा सकता है।
एक इंजन कई यांत्रिक भागों से बना होता है, और प्रत्येक भाग को उच्च परिशुद्धता के साथ बनाया जाना चाहिए। इसके अतिरिक्त, इंजन को इलेक्ट्रॉनिक रूप से नियंत्रित करने के लिए कई सेंसर का उपयोग किया जाता है, जिससे नियंत्रण जटिल हो जाता है।
इंजनों की तुलना में, मोटरों की संरचना सरल होती है और इन्हें सीधे बिजली से चलाया जा सकता है, जो उन्हें सटीक विद्युत नियंत्रण के लिए उपयुक्त बनाता है।
यह बात भी मत भूलिए. चूँकि इंजन गैसोलीन जलाते हैं और उसे बिजली में परिवर्तित करते हैं, वे अनिवार्य रूप से कार्बन डाइऑक्साइड (CO2) उत्सर्जित करते हैं। दूसरी ओर, एक मोटर स्वयं गैस उत्सर्जित नहीं करती है।
जैसे-जैसे कार्बन तटस्थता की ओर रुझान बढ़ता जा रहा है, मोटरों से बड़ी उम्मीदें लगाई जाने लगी हैं।
इन विशेषताओं के कारण, मोटरें वर्तमान में विभिन्न उपकरणों और उपकरणों के लिए बिजली स्रोतों और नियंत्रण उपकरणों की भूमिका निभाती हैं। भविष्य में, जिन स्थितियों में इसका उपयोग किया जाता है उनकी संख्या में वृद्धि जारी रहेगी।
संबंधित लेख: ज्ञान "स्टेपिंग मोटर क्या है? इसके तंत्र, प्रकार, उपयोग (ड्राइव सिस्टम और नियंत्रण विधि), लाभ और विशेषताओं का स्पष्टीकरण"
यहां हम विस्तार से बताएंगे कि स्टेपिंग मोटर्स कैसे काम करती हैं और उनकी विशेषताएं क्या हैं।

समाज में तकनीकी नवाचार के प्रवाह के बीच मोटर्स का आविष्कार और विकास हुआ।
मूल रूप से, मनुष्य मानव या पशु शक्ति का उपयोग करके वस्तुओं को स्थानांतरित करते थे। प्राचीन काल और आज भी, मनुष्यों के लिए अपनी शक्ति का उपयोग करके चीजों को स्थानांतरित करना हमेशा आम बात रही है। इसके अतिरिक्त, कहा जाता है कि घोड़े से खींची जाने वाली गाड़ियों का आविष्कार ईसा पूर्व से पहले हुआ था, और जैसा कि आप जानते हैं, जापान के हेन अभिजात वर्ग बैल गाड़ियों का इस्तेमाल करते थे।
हालाँकि, इससे कोई फर्क नहीं पड़ता कि मानव या पशु शक्ति के साथ कितने लीवर और पुली का उपयोग किया गया था, गति और शक्ति की सीमाएँ थीं।
1700 के दशक के अंत से 1800 के दशक तक हुई औद्योगिक क्रांति ने इस प्रकार की शक्ति में एक बड़ा परिवर्तन लाया।
भाप इंजन, जिसकी शक्ति मनुष्यों और जानवरों से कहीं अधिक थी, प्रकट हुआ और कारखाना-आधारित मशीन उद्योग की स्थापना हुई। सामाजिक संरचना कृषि समाज से औद्योगिक समाज में बदल गई। इसके अतिरिक्त, भाप इंजनों, भाप कारों और भाप जहाजों के विकास ने परिवहन और रसद के स्वरूप को महत्वपूर्ण रूप से बदल दिया। हालाँकि, भाप इंजनों के बड़े और भारी होने का नुकसान था।
आविष्कारकों और शोधकर्ताओं ने भाप इंजन के लिए वैकल्पिक ऊर्जा स्रोतों की खोज शुरू कर दी। इन्हीं बदलावों के बीच मोटर्स का उदय हुआ।
ब्रिटिश वैज्ञानिक माइकल फैराडे ने 1821 में मोटर और जनरेटर के सिद्धांत की खोज की। 1831 में उन्होंने विद्युत चुम्बकीय प्रेरण के नियम की खोज की। इसे मोटरों पर लागू किया जाएगा।
फैराडे के बाद, संयुक्त राज्य अमेरिका में थॉमस डेवनपोर्ट और अन्य लोगों द्वारा एक डीसी मोटर (डायरेक्ट करंट मोटर) विकसित की गई थी, लेकिन इसे व्यावहारिक उपयोग में लाना मुश्किल था।
पहली व्यावहारिक मोटर दो-परत एसी इंडक्शन मोटर थी, जिसका आविष्कार निकोला टेस्ला ने किया था। 1888 में, टेस्ला ने अपने द्वारा आविष्कार की गई मोटर को घुमाने के लिए एक पॉलीफ़ेज़ इंडक्शन जनरेटर विकसित किया और 1889 में उन्होंने इसके लिए पेटेंट प्राप्त किया। परिणामस्वरूप, मोटरों को व्यावहारिक उपयोग में लाया जाएगा।
तब से, मोटरों का विकास जारी रहा है, वे न केवल एक शक्ति स्रोत के रूप में बल्कि एक नियंत्रण उपकरण के रूप में भी भूमिका निभा रहे हैं। वर्तमान में, यह कहा जाता है कि जापान की 50% बिजली मोटरों द्वारा खपत की जाती है। मोटरें मानव जीवन में इतनी गहराई से शामिल हैं कि वे सभ्यता का समर्थन करती हैं।
सान्यो डेन्की कंपनी लिमिटेड की मोटरों का इतिहास 20वीं शताब्दी के पूर्वार्ध तक जाता है।
सबसे पहले, 1932 में, उन्होंने वायरलेस संचार उपकरणों में उपयोग के लिए मोटर के समान मूल संरचना वाला एक जनरेटर विकसित किया। 1952 में, कंपनी ने सैन्य संचार ऊर्जा स्रोतों के लिए निर्मित घूर्णन मशीनरी को नागरिक उपयोग में परिवर्तित कर दिया। सान्यो डेन्की कंपनी लिमिटेड दूरसंचार और विद्युत आपूर्ति के क्षेत्र में एक प्रमुख निर्माता बन गयी।
1952 में, कंपनी को इलेक्ट्रोटेक्निकल टेस्टिंग लेबोरेटरी (अब नेशनल इंस्टीट्यूट ऑफ एडवांस्ड इंडस्ट्रियल साइंस एंड टेक्नोलॉजी) से सर्वो मोटर विकसित करने का अनुरोध प्राप्त हुआ और उसने अनुसंधान शुरू किया। इसके तुरंत बाद, हमने जापान की पहली घरेलू निर्मित सर्वो मोटर पूरी कर ली। पहले तो उतनी मांग नहीं थी जितनी कि उम्मीद थी, और परियोजना कभी साकार नहीं हो सकी, लेकिन यह वर्तमान सान्यो डेन्की कंपनी लिमिटेड जिसका मुख्य उत्पाद सर्वो मोटर है।
सर्वो मोटर को पूरा करने के बाद, हमने पहली घरेलू स्तर पर उत्पादित स्टेपिंग मोटर और पहले घरेलू स्तर पर उत्पादित पंखे को भी पूरा किया। इन "जापान में प्रथम" उत्पादों को विकसित करते हुए, हम OA (कार्यालय स्वचालन) और FA (फ़ैक्टरी स्वचालन) की लहर पर सवार हैं और विश्व स्तर पर अपने विभिन्न मोटरों का विस्तार कर रहे हैं।
मूल रूप से, एक मोटर चुम्बकों के गुणों का उपयोग करके घूमती है: ``विभिन्न ध्रुव एक दूसरे को आकर्षित करते हैं'' और ``समान ध्रुव एक दूसरे को विकर्षित करते हैं।''
उदाहरण के लिए, रेडियो नियंत्रण में प्रयुक्त एक छोटी मोटर की कल्पना करें। एक छोटी मोटर में घूमने वाले शाफ्ट के साथ एक कुंडल होती है और कुंडल के दोनों किनारों पर उत्तरी और दक्षिणी ध्रुव वाले स्थायी चुंबक होते हैं।
जब मोटर पर बिजली लागू की जाती है, तो कॉइल एक विद्युत चुंबक बन जाती है। यदि आप कुंडली को उत्तरी और दक्षिणी ध्रुवों वाले चुंबक में बदलने के बारे में सोचें तो इसे समझना आसान हो सकता है।
फिर, उत्तरी-ध्रुव स्थायी चुंबक और कुंडल का उत्तरी ध्रुव विकर्षित होता है, और दक्षिणी-ध्रुव स्थायी चुंबक और कुंडल का दक्षिणी ध्रुव विकर्षित होता है। इसका यह भी अर्थ है कि एन-पोल स्थायी चुंबक और कुंडल का एस-पोल एक दूसरे को आकर्षित करते हैं, और एस-पोल स्थायी चुंबक और कुंडल का एन-पोल एक दूसरे को आकर्षित करते हैं।
इसके कारण कुंडल घूर्णन अक्ष के चारों ओर 180 डिग्री घूमती है।
हालाँकि, यदि यह अकेले किया जाता है, तो कुंडल 180 डिग्री घूमना बंद कर देगा। ऐसा इसलिए है क्योंकि उत्तरी ध्रुव स्थायी चुंबक और कुंडल का दक्षिणी ध्रुव एक दूसरे को आकर्षित करते हैं, और दक्षिणी ध्रुव स्थायी चुंबक और कुंडल का उत्तरी ध्रुव एक दूसरे के प्रति आकर्षित रहते हैं। इसे 180 डिग्री आगे घुमाने और फिर घूर्णन अक्ष को 360 डिग्री घुमाने के लिए मुझे क्या करना चाहिए?
इसलिए, कुंडल के माध्यम से बहने वाली बिजली की दिशा बदलकर, एन और एस ध्रुवों की स्थिति को बदला जा सकता है।
पहले रुकी हुई अवस्था में, एन-पोल स्थायी चुंबक और कुंडल का एस-पोल एक दूसरे के प्रति आकर्षित थे, और एस-पोल स्थायी चुंबक और कुंडल का एन-पोल एक दूसरे के प्रति आकर्षित थे। वहां, विद्युत धारा ब्रशों से होकर गुजरती है और कम्यूटेटर नामक एक घटक का उपयोग करके प्रवाह की दिशा बदलती है, जो कुंडल के उत्तरी और दक्षिणी ध्रुवों को स्वैप करती है।
फिर, स्थायी चुंबक का N ध्रुव और कुंडल का N ध्रुव एक दूसरे को प्रतिकर्षित करते हैं, और स्थायी चुंबक का S ध्रुव और कुंडल का S ध्रुव एक दूसरे को प्रतिकर्षित करते हैं। इसी समय, स्थायी चुंबक का एन ध्रुव और कुंडल का एस ध्रुव एक दूसरे को आकर्षित करते हैं, और स्थायी चुंबक का एस ध्रुव और कुंडल का एन ध्रुव एक दूसरे को आकर्षित करते हैं। इसके कारण कुंडल अतिरिक्त 180 डिग्री घूमती है। अब यह 360 डिग्री घूम चुका है।
गतियों की इस श्रृंखला को दोहराते हुए मोटर लगातार घूमती रहती है।
यहां से, हम "मोटर्स को ऊर्जा स्रोत के रूप में" और "मोटर्स को नियंत्रण उपकरणों के रूप में" पेश करेंगे।

उपकरण और उपकरणों के लिए शक्ति स्रोत के रूप में काम करने वाली मोटरों को बिजली आपूर्ति के आधार पर दो मुख्य प्रकारों में विभाजित किया जा सकता है: डीसी मोटर और एसी मोटर।
"डीसी मोटर" एक मोटर है जो इसके माध्यम से प्रत्यक्ष विद्युत धारा प्रवाहित करके संचालित होती है।
इनका उपयोग रोजमर्रा के उपकरणों से लेकर कारखानों में उपयोग होने वाले उपकरणों तक, विभिन्न प्रकार की चीजों में किया जाता है।
डीसी मोटर दो प्रकार की होती हैं: ब्रश डीसी मोटर और ब्रशलेस डीसी मोटर। ब्रश एक घटक है जो कॉइल तक बिजली पहुंचाता है।
ब्रश डीसी मोटर में अंदर की तरफ एक कुंडल और बाहर की तरफ एक स्थायी चुंबक होता है, और ब्रश के माध्यम से प्रत्यक्ष धारा प्रवाहित करके रोटर (घूर्णन शाफ्ट) को घुमाता है। यह वह मोटर है जो शुरुआत में पेश किए गए सरल तंत्र का उपयोग करती है, और रेडियो नियंत्रण, मॉडल आदि में उपयोग की जाती है।
इस मोटर की एक विशेषता यह है कि रोटेशन की गति मूल रूप से वोल्टेज के अनुपात में बढ़ जाती है।
उदाहरण के लिए, जब एक ब्रश डीसी मोटर बैटरी द्वारा संचालित होती है, तो यह एक बैटरी का उपयोग करने की तुलना में दो बैटरियां कनेक्ट होने पर तेजी से घूमेगी। हालाँकि, कम्यूटेटर जो कॉइल के माध्यम से बहने वाली बिजली की दिशा बदलता है और कार्बन ब्रश लगातार एक-दूसरे के संपर्क में रहते हैं, इसलिए लंबे समय तक संचालित होने पर वे खराब हो जाते हैं, इसलिए नियमित रखरखाव की आवश्यकता होती है।
दूसरी ओर, ब्रशलेस डीसी मोटर (बीएलडीसी मोटर) के अंदर एक स्थायी चुंबक और बाहर की तरफ एक कुंडल होता है, और यह एक मोटर है जो वर्तमान नियंत्रण सर्किट के माध्यम से कुंडल के माध्यम से बिजली प्रवाहित करके आंतरिक स्थायी चुंबक को घुमाती है।
चूंकि ब्रश नहीं हैं, इसलिए रखरखाव की आवृत्ति कम की जा सकती है, और ब्रश घिसे-पिटे मलबे का उत्पादन नहीं करता है, इसलिए इसका उपयोग स्वच्छ वातावरण में किया जा सकता है। हालाँकि, इसमें करंट की दिशा को नियंत्रित करने के लिए मोटर के बाहर एक सर्किट की आवश्यकता होती है, और यह ब्रश डीसी मोटर की तुलना में अधिक महंगा है।
| मोटर प्रकार |
योग्यता | नुकसान |
|---|---|---|
| ब्रश डीसी मोटर | कम लागत | जल्दी खराब हो जाता है |
| ब्रशलेस डीसी मोटर | लंबा जीवन | उच्च लागत |
"एसी मोटर" एक मोटर है जो प्रत्यावर्ती धारा विद्युत प्रवाहित करके संचालित होती है। बाहर की तरफ एक कुंडल है और अंदर की तरफ एक "पिंजरे के आकार का" रोटर है।
एसी मोटर की विशेषता यह है कि इन्हें कम्यूटेटर, ब्रश या कंट्रोल सर्किट की आवश्यकता नहीं होती है। क्योंकि उनकी संरचना सरल होती है और उन्हें कम लागत पर निर्मित किया जा सकता है, इसलिए उनका उपयोग विभिन्न प्रकार के अनुप्रयोगों में किया जाता है, जिसमें घरेलू उपकरण जैसे बिजली के पंखे और वैक्यूम क्लीनर, पानी पंप और कन्वेयर और औद्योगिक उपकरण शामिल हैं।
उपकरण और उपकरण के संचालन को सटीक रूप से नियंत्रित करने के लिए उपयोग की जाने वाली मोटरों के विशिष्ट उदाहरण स्टेपिंग मोटर और सर्वो मोटर हैं।
स्टेपिंग मोटर एक ऐसी मोटर है जिसका रोटर एक निश्चित कोण (स्थिति) से घूमता है।
एक एनालॉग घड़ी की कल्पना करें. दूसरा हाथ एक बार में एक सेकंड घूम रहा है। एक स्टेपिंग मोटर को पूर्व निर्धारित कोण से चलने के लिए नियंत्रित किया जा सकता है। एनालॉग घड़ियों के अलावा, इनका उपयोग प्रिंटर, एयर कंडीशनर लाउवर, एटीएम, टिकट वेंडिंग मशीन, स्वचालित टिकट गेट सिस्टम आदि में किया जाता है।
रोटर को एक सटीक कोण से घुमाने का तंत्र सरल है। स्टेपिंग मोटर के रोटर में कई खांचे होते हैं। फिर मोटर पर बिजली लागू की जाती है, और एक बार जब रोटर इच्छित खांचे में चला जाता है, तो बिजली बंद कर दी जाती है। इससे रोटर एक सटीक कोण से घूमता है और फिर रुक जाता है।
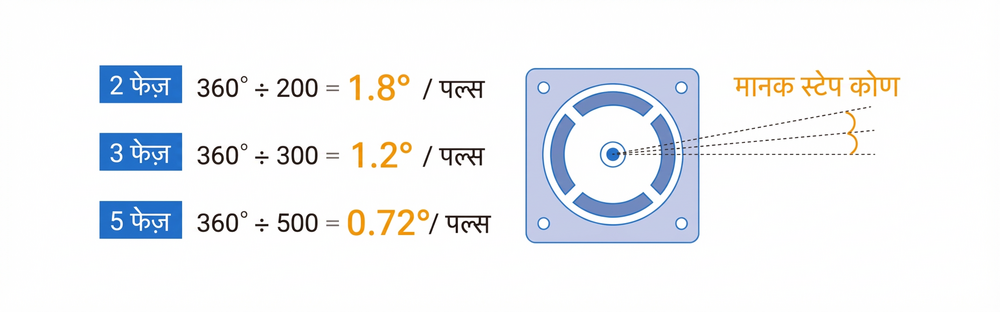
उदाहरण के लिए, दो-चरण स्टेपिंग मोटर में आमतौर पर 200 खांचे होते हैं। चूँकि 360 डिग्री के एक घुमाव को 200 भागों में विभाजित किया गया है, प्रति खांचे में गति का कोण 1.8 डिग्री है। यदि आप मोटर को 18 डिग्री घुमाना चाहते हैं, तो आपको मोटर में बिजली लगानी होगी, रोटर को 10 खांचे में घुमाना होगा और फिर बिजली बंद करनी होगी।
स्टेपिंग मोटर को नियंत्रित करने के लिए, आपको एक नियंत्रक की आवश्यकता होती है। नियंत्रक की भूमिका सिग्नल भेजने की है जो स्टेपिंग मोटर को बताती है कि कितना चलना है। सबसे पहले, आधार यह है कि चालू से बंद तक बिजली के एक सेट को एक पल्स के रूप में गिना जाता है। फिर, जब नियंत्रक स्टेपिंग मोटर को एकल पल्स सिग्नल भेजता है, तो रोटर एक खांचे में घूमता है और फिर रुक जाता है।
पिछले उदाहरण की तरह, मान लें कि आप 200 खांचे वाली दो-चरण स्टेपिंग मोटर को 18 डिग्री तक घुमाना चाहते हैं। इस स्थिति में, नियंत्रक 10 पल्स सिग्नल भेजेगा। जब स्टेपिंग मोटर को सिग्नल मिलता है, तो यह 18 डिग्री या 10 खांचे में घूमती है, और फिर रुक जाती है।
इस प्रकार, स्टेपिंग मोटर को नियंत्रित करने के लिए एक नियंत्रक की आवश्यकता होती है।
एक सर्वो मोटर, स्टेपिंग मोटर की तरह, एक मोटर है जिसका उद्देश्य रोटर को एक इच्छित कोण से घुमाना है। हालाँकि, सर्वो मोटर्स और स्टेपिंग मोटर्स के बीच स्पष्ट अंतर हैं।
सर्वो मोटर रोटार में खांचे नहीं होते हैं। इसलिए, रोटर को 1.8-डिग्री वृद्धि में घुमाने जैसा कोई प्रतिबंध नहीं है, इसलिए यदि उच्च-रिज़ॉल्यूशन सेंसर का उपयोग किया जाता है, तो रोटर को 1/1,000,000 डिग्री के सटीक कोण पर रोका जा सकता है।
इस नियंत्रण के लिए सेंसर आवश्यक हैं। सर्वो मोटर्स के साथ, यह सेंसर रोटर की घूर्णी स्थिति को सटीक रूप से निर्धारित करता है, जिससे यह वांछित कोण पर रुकने की अनुमति देता है। इसके अलावा, मशीन के रुकने के बाद भी इसकी निगरानी की जाती रहती है और यदि रुकने का कोण भटकता है, तो इसे स्वचालित रूप से तुरंत ठीक कर दिया जाता है।
ऊपर हमने मोटरों की भूमिका और प्रकार, उनके इतिहास, संचालन सिद्धांतों और संरचनाओं का परिचय दिया है।
मोटरों की विशेषताओं को समझने से इष्टतम मोटर चयन और बेहतर उपकरण प्रदर्शन हो सकेगा।
सान्यो डेन्की कंपनी लिमिटेड विभिन्न प्रकार के मोटरों का संचालन करता है। यदि मोटर चयन के संबंध में आपके कोई प्रश्न हों तो कृपया हमसे संपर्क करें।
रिलीज़ की तारीख:



विनिर्माण का लक्ष्य दुनिया में नंबर 1 बनना है

तकनीकी क्षमताएं जो उन्नत अनुकूलन को सक्षम बनाती हैं

जल्द ही 100वीं वर्षगांठ

वैश्विक नेटवर्क

