山洋教室
【種類と特長】ステッピングモータとは?仕組み・種類



ステッピングモータは制御モータの一種で,電流を流す相を切り替えることで時計のように一定の角度ずつ動いて回転する仕組みのモータです。センサなしに位置決めができます。パルスモータ,ステップ,ステッパモータなどとも呼ばれることがあります。
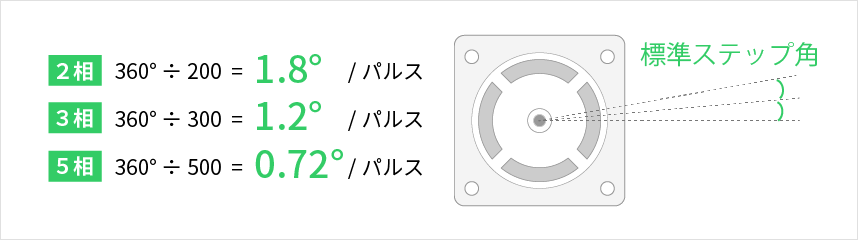
ステッピングモータは構造によって,2相,3相,5相に分類されます。
時計のように回転するステッピングモータは,1パルスで動かせる角度を「基準ステップ角」と呼びます。基準ステップ角が細かければ細かいほど,滑らかでより精度の高い動きができます。
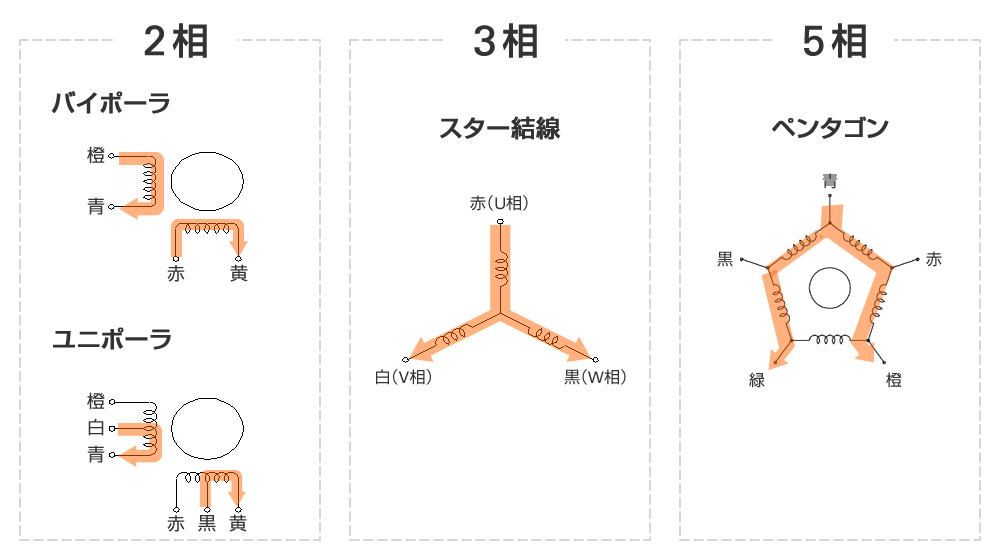
ステッピングモータを駆動するにはドライバが必要です。ドライバを作るときに気を付けていただきたいのは,2相の場合,バイポーラ駆動かユニポーラ駆動かによって,ドライバの駆動回路が異なります。3相と5相は,電流を双方向に流すことが可能なドライバが必要になります。
また,2相や3相ステッピングモータは,巻線構造が簡単なため,メーカーが違っても,同じ駆動回路でモータを回すことができます。しかし,5相ステッピングモータの場合,巻線構造が複雑で,モータを回すために流す相の組み合わせや順番も1通りではありません。したがって,5相ステッピングモータの場合,組み合わせるドライバには注意が必要です。
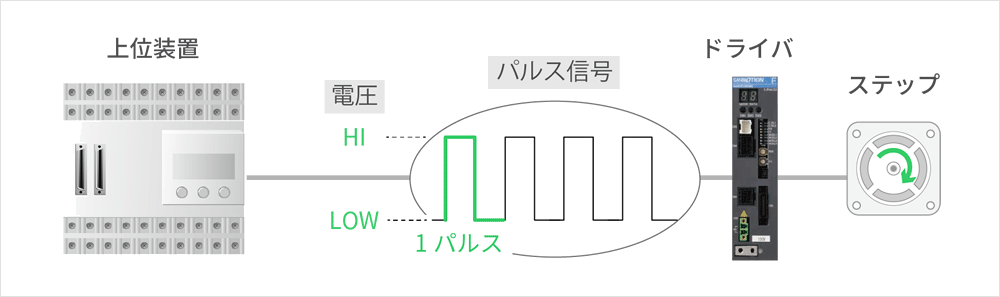
まずはパルス指令の信号についてですが,これは電圧のON/OFF(HI/LOW)が繰り返される電気信号のことです。HI/LOWの1サイクルを1パルスと数えます。
パルス信号は,上位コントローラなどからドライバに入力させますが,このパルス信号の数で,回転角度を制御します。
ステッピングモータの速度制御
回転速度はパルス数の密度でコントロールします。1パルスで1基準ステップ角が回転する場合,1秒に10パルスを送るのが,1秒に1パルスを送るのよりも,1秒の回転した角度が大きいです。なので,パルスの周波数が高ければ,回転速度が速いのです。
ステッピングモータの位置制御
最近のドライバは,相に流す電流量を細かく制御して,モータの基準ステップ角よりも小さい角度で位置決めすることが可能なマイクロステップ方式が採用されるようになり,より細かい位置制御ができます。
利点 1:制御が簡単
ドライバのトランジスタを正しくON/OFFさせるだけで簡単に回すことができます。回転速度もON/OFFのタイミングを早くするだけで簡単に上げることができます。
利点 2:システムの簡素化が可能
ドライバに入力するパルスとその周波数でモータを簡単に制御できるため,複雑なコントローラを必要としない。また,ステッピングモータの最大の特徴である「検出器なしで位置や速度を制御できる」ことにより,システムの簡素化が可能となります。
利点 3:安価なシステム構築が可能
ドライバは単純で検出器も不要なことと,複雑なコンローラを必要としないことから,安価にシステムを構築できます。
利点 4:安定停止が可能
ステッピングモータは磁力で停止させるモータなので,止める力(ホールディングトルク)を発生させるため,安定停止するのです。
ステッピングモータは,日常生活で私たちの目に直接触れることはないものの,さまざまなシーンで私たちの生活を支えてくれる,数多くの「機械の中」で働いています。実際にどこに使われているのでしょうか?その代表例が下記のような用途です。
詳しくは 「ステッピングモータとは? ステッピングモータの用途・使用例」 をご確認ください。
注意点 1:脱調してしまう
センサは必要ないが,位置を確認していないので,指令通りに動いていない(脱調した)場合でも気が付けない。クローズドループ制御をしているサーボモータに比べると,信頼性が低いです。
注意点 2:発熱が高い
停止中にもホールディングトルクを発生させているために,発熱してしまう。
注意点 3:振動する
一定の角度ずつ回転するモータは,階段を上り降りするように1段ずつ移動するために,必ず移動時に振動してしまう。
| ステッピングモータ | サーボモータ | |||
| 制御 | オープンループ | クローズドループ | ||
| トルク | 検出器なし | モータを止める方向に,常に一定のトルクを発生させる。 | モータ電流検出器 | モータを回転させる方向にモータ電流を制御して,指令したトルクを発生させる。 |
| 回転速度 | 検出器なし | 入力パルス周波数に同調した速度で回転する。同調出来ないと脱調する。 | モータ速度検出器 | 指令した速度でモータを回転するように,モータ速度を確認しながら移動する。 |
| 位置(角度) | 検出器なし | 入力したパルス分だけ移動する。移動が間に合わないと脱調する。 | モータ位置検出器 | 指令した目標位置に到達するように,モータ位置を確認しながら移動する。 |
| 特徴 | 安価で使いやすく,低速で高トルク | 高価だが様々な機能があり,高速まで高トルク | ||
| 摩擦 | 摩擦が大きくても,素早く正確に位置決め可能。 | 精密な位置決めが可能だが,摩擦が大きいと時間を要する。 | ||
| 共振・振動 | 速度リップルが大きく,共振をモータで抑制できない。 | 速度リップルや共振を,ドライバの機能にて抑制できる。 | ||
| イナーシャ比 | イナーシャが大きいとモータを制御できない。 | イナーシャ比が大きくてもモータを制御できる。 | ||
| 得意なこと 使い分け |
同じ位置をキープすること。 | 安定して(振動や騒音がなく)回転すること。 | ||
| 低速,短距離の起動停止動作。 | 高速,高加速度の起動停止動作。 | |||
| 軽加工動作。 | 精密加工,重加工動作。 | |||
公開日:

世界No.1をめざしたモノづくり

高度なカスタマイズを実現する技術力

もうすぐ創業100年

グローバルネットワーク