

Knowledge
[Types and Features] What Is a Motor?



A motor is a device that converts electrical energy into mechanical energy. Motors are used in a wide range of applications, including familiar household appliances such as washing machines, electric fans, and air conditioners. They are also essential components in systems that support social infrastructure, such as ATMs (automated teller machines) and automatic ticket gates at train stations.
From this perspective, it can be said that everyone living in modern society benefits from motors in their daily lives. There are other sources of mechanical power, such as engines and steam engines, that are capable of generating mechanical motion.
However, motors have three distinctive features that are not found in other types of power sources.
For example, the thermal efficiency of a typical engine is often said to be 30% to 40%. This means that only 30% to 40% of the input energy is converted into mechanical power, while the remaining 60% to 70% is lost as heat.
In contrast, the energy conversion efficiency of a motor is 80% or higher. As a result, motors convert electrical energy into mechanical power with significantly less loss than engines.
An engine consists of many mechanical components, each of which must be manufactured with high precision. Furthermore, electronic control of an engine requires numerous sensors, resulting in a complex control system.
In comparison, a motor has a much simpler structure, and it can be driven directly by electricity. This makes motors well suited to precise control through electrical signals.
This is another important point that should not be overlooked. Engines convert energy into mechanical power by burning gasoline, which inevitably results in the emission of carbon dioxide (CO₂). In contrast, motors do not emit any gases during operation.
For this reason, motors are attracting growing attention and high expectations as efforts to achieve carbon neutrality continue to accelerate.
Because of these characteristics, motors are now used as power sources and control components in a wide variety of facilities and equipment. Going forward, the range of applications for motors is expected to expand even further.
Related article: Knowledge "What is a stepping motor? Explanation of its mechanism, types, usage (drive system and control method), advantages and features"
In the following section, the mechanisms and features of stepping motors are explained in detail.

Motors were invented and have continued to evolve as part of the broader flow of technological innovation in society.
Originally, humans moved objects using their own physical strength or the power of animals. Using human power to perform physical tasks has been a natural part of daily life in both the past and the present. Animal power was also widely used, and horse‑drawn vehicles are said to have been invented before the Common Era. In Japan, it is well known that ox-drawn carts were used by aristocrats during the Heian period.
However, even with tools such as levers and pulleys, the speed and power of human and animal labor were limited.
This situation changed dramatically with the Industrial Revolution, which took place from the late 18th century through the 19th century.
Steam engines, which provided far more power than humans or animals, were introduced and led to the establishment of mechanized factory production. As a result, society underwent a major transformation, shifting from an agricultural society to an industrial society. The development of steam locomotives, steam-powered vehicles, and steamships also brought significant changes to transportation and logistics. However, steam engines had a major drawback, as they were large and heavy.
Inventors and researchers began to search for new sources of power to replace steam engines. Motors emerged in the midst of these technological changes.
In 1821, the British scientist Michael Faraday discovered the basic principles of motors and generators. In 1831, he went on to discover the law of electromagnetic induction, which would later be applied to motor technology.
Following Faraday’s work, direct current motors, also known as DC motors, were developed by Thomas Davenport and others in the United States. However, these early motors did not easily reach the stage of practical application.
The first practical motor is widely considered to be the two-phase AC induction motor invented by Nikola Tesla. In 1888, Tesla developed a polyphase induction generator to drive his motor, and he obtained a patent for this technology in 1889. These developments paved the way for the practical use and widespread adoption of motors.
Since then, motors have continued to evolve while serving not only as sources of power but also as components for control. Today, it is said that around 50% of electricity consumption in Japan is attributable to motors. This illustrates how deeply motors are integrated into everyday life and how they have become essential technologies that support modern civilization.
The history of SANYO DENKI motors dates back to the first half of the 20th century.
In 1932, the company developed a generator for wireless communication equipment. Although it was used as a generator, its basic operating principles and structure were the same as those of a motor. In 1952, rotating machines that had previously been manufactured for military communication power supplies were redirected for civilian use. Through this transition, SANYO DENKI gradually established itself as a leading manufacturer in the fields of telecommunications and power supply systems.
In 1952, SANYO DENKI received a request from the Electrotechnical Laboratory, now known as the National Institute of Advanced Industrial Science and Technology, to develop a servo motor and began related research. Soon afterward, the company succeeded in completing Japan’s first domestically developed servo motor. Although demand did not initially grow as expected and the product was not widely adopted at the time, this achievement later became the foundation of SANYO DENKI’s current focus on servo motors.
After completing the servo motor, SANYO DENKI also developed Japan’s first domestically produced stepping motor and fan. By building a series of products that were the first of their kind in Japan, the company grew alongside the rise of office automation and factory automation. Today, SANYO DENKI’s motors are supplied to customers worldwide.
Motors rotate by using the magnetic properties that opposite poles attract each other and like poles repel each other.
For example, consider a small motor used in a radio-controlled device. Inside the motor, a coil with a rotating shaft is placed between permanent magnets with north and south poles.
When electricity flows through a motor, the coil becomes an electromagnet. It may be helpful to think of the coil as temporarily turning into a magnet with north and south poles.
As a result, the north pole of the permanent magnet repels the north pole of the coil, while the south pole of the permanent magnet repels the south pole of the coil. At the same time, the north pole of the permanent magnet attracts the south pole of the coil, and the south pole of the permanent magnet attracts the north pole of the coil.
These forces cause the coil to rotate 180 degrees around its shaft.
However, if this is all that happens, the coil stops after rotating 180 degrees. This is because the north pole of the permanent magnet continues to attract the south pole of the coil, and the south pole of the permanent magnet continues to attract the north pole of the coil. So how can the coil be rotated another 180 degrees to complete a full 360-degree rotation of the shaft?
To keep the coil rotating, the direction of the current is reversed, which switches the north and south poles of the coil.
IWhen the current direction is changed by brushes and a component called a commutator, the magnetic forces are reversed.
As a result, like poles repel each other and opposite poles attract each other once again, causing the coil to rotate an additional 180 degrees. In this way, the shaft completes a full 360-degree rotation.
By repeating this sequence of actions, a motor is able to rotate continuously.
From here, we will introduce motors in two roles: as sources of power and as components for control.

Motors used as power sources for equipment and machinery are mainly classified into two types based on the type of power supply: DC motors and AC motors.
A DC motor, or direct current motor, is a type of motor that operates by supplying direct current electricity.
DC motors are used in a wide range of applications, from everyday household electrical appliances to industrial equipment used in factories.
There are two main types of DC motors: brushed DC motors and brushless DC motors. Brushes are components that supply electrical current to the rotating coil.
A brushed DC motor consists of an internal coil and external permanent magnets. By supplying direct current through brushes, the rotor is driven to rotate. This simple operating principle makes brushed DC motors suitable for applications such as radio-controlled devices and model kits.
One characteristic of this type of motor is that its rotational speed generally increases in proportion to the applied voltage.
For example, when a brushed DC motor is powered by dry-cell batteries, it rotates faster when two batteries are connected than when only one battery is used. However, because the commutator and carbon brushes are always in contact, they wear over time and need regular maintenance.
A brushless DC motor (BLDC motor) has permanent magnets on the inside and coils on the outside. By supplying current to the coils through an electronic control circuit, the internal permanent magnets are driven to rotate.
As there are no brushes, maintenance is reduced and no dust is generated, making these motors suitable for clean environments. However, the need for an external control circuit makes them more expensive than brushed DC motors.
| Motor Type |
Advantages | Limitations |
|---|---|---|
| Brushed DC Motor | low cost | Deterioration is rapid |
| Brushless DC Motor | Long service life | High cost |
An AC motor, or alternating current motor, is a type of motor that operates using alternating current electricity. It has coils on the outside and a cage-type rotor on the inside.
A key feature of AC motors is that they do not require components such as commutators, brushes, or external control circuits. Because of their simple structure, they can be manufactured at relatively low cost. As a result, AC motors are widely used in many applications, including household appliances such as electric fans and vacuum cleaners, as well as pumps for water supply, conveyor systems, and various types of industrial equipment.
For motors used to precisely control the operation of machines and equipment, stepping motors and servo motors are among the most typical examples.
A stepping motor is a motor in which the rotor rotates by a fixed angle, or position, each time it moves.
To better understand this, imagine an analog clock. The second hand moves forward in fixed steps, once every second. In the same way, a stepping motor can be controlled to move by predetermined angles with high precision. Stepping motors are used in a wide range of applications, including analog clocks, printers, air conditioner louvers, ATMs, ticket vending machines, and gate systems for automatic ticket gates.
The mechanism that allows the rotor to rotate by precise angles is simple. The rotor of a stepping motor has many evenly spaced slots. When electrical current is applied, the rotor moves to the intended slot, and the current is then stopped. As a result, the rotor rotates by an exact angle and comes to a stop.
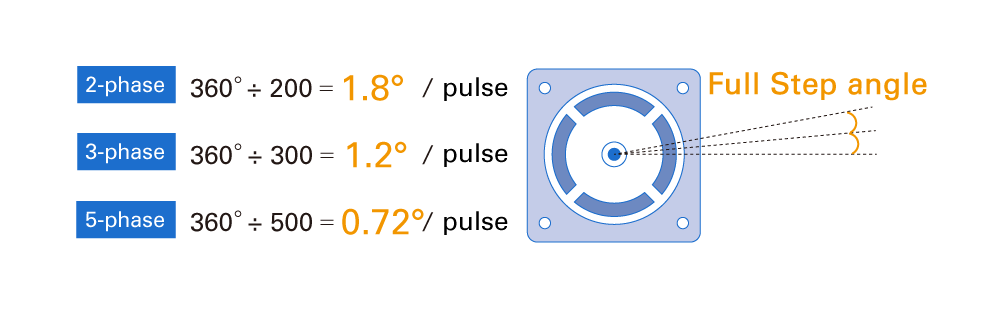
For example, a two-phase stepping motor typically has 200 slots in its rotor. Since one full rotation of 360 degrees is divided into 200 steps, the rotation angle per slot is 1.8 degrees. If a rotation of 18 degrees is required, current is supplied to the motor until the rotor moves by 10 slots, after which the current is stopped.
To control a stepping motor, a controller is required. The role of the controller is to send signals that specify how much the stepping motor should move. First, as a basic concept, one cycle of turning the electrical signal on and then off is counted as one pulse. When the controller sends a single pulse signal to the stepping motor, the rotor rotates by one slot and then stops.
As in the previous example, consider rotating a two-phase stepping motor with 200 slots by 18 degrees. In this case, the controller sends 10 pulse signals to the motor. Upon receiving these signals, the stepping motor rotates by 18 degrees, corresponding to 10 slots, and then stops.
Controlling a stepping motor requires a controller.

A servo motor, like a stepping motor, is designed to rotate the rotor by a specified angle. However, there is a clear difference between servo motors and stepping motors.
In a servo motor, the rotor has no slots. As a result, there is no restriction such as rotating the rotor in fixed steps of 1.8 degrees. By using a high-resolution sensor, the rotor can be stopped at extremely precise angles, even on the order of one millionth of a degree.
This control is achieved using a sensor. In a servo motor, the sensor precisely detects the rotor position, enabling the motor to stop at the intended angle. The position is continuously monitored after stopping, and any deviation is automatically corrected.
In this article, we have introduced the roles and types of motors, as well as their history, operating principles, and structures.
Understanding the characteristics of motors enables the selection of the most suitable motor for each application and helps improve overall equipment performance.
SANYO DENKI offers a wide range of motors. If you have any questions regarding motor selection, please feel free to contact us.
Release date:



Aiming to be the world's No. 1 in manufacturing

Technical capabilities that enable advanced customization

Our 100th anniversary soon

Global Network

