Knowledge
[Basic Knowledge for Selecting a Motor]



Semiconductor manufacturing equipment requires highly precise positioning down to the nanometer along with high responsiveness. As a result, selecting the right control motor is a key factor that directly affects the equipment’s reliability and productivity.
Selecting the optimal motor for the motion requirements of each process is essential for improving yield and ensuring stable operation of the equipment.
A control motor is more than just a drive component; it plays a crucial role as part of the control system, supporting the equipment’s motion accuracy.
In addition to positioning accuracy and response speed, various performance factors such as compact size and low weight, environmental resistance, and ease of maintenance influence the equipment’s productivity and manufacturing quality. Therefore, selecting the right motor requires a high level of technical expertise.
In this article, we introduce the major types and characteristics of control motors, key selection points based on the requirements of each manufacturing process, and practical examples of their implementation. These insights will help you make more informed decisions when selecting a control motor.
The control motors used in semiconductor manufacturing equipment fall into several categories, each with its own characteristics. Understanding these characteristics and selecting the optimal motor based on the requirements of each process is essential for achieving the best performance.
Servo motors are capable of precisely controlling position, speed, and torque. With closed‑loop control using a high‑resolution encoder, they achieve both high‑accuracy positioning and fast response.
They are ideal for applications that require precise control, such as transfer stages and alignment mechanisms, and are widely used across many processes in semiconductor manufacturing equipment.
However, compared with stepping motors, they are more expensive and require a more complex control system.

Linear servo motors are control motors that generate direct linear motion instead of rotational motion.
Since they do not require a rotary‑to‑linear conversion mechanism such as a ball screw, they enable high‑speed operation over long strokes, high‑accuracy and high‑response positioning, and stable performance even in high‑acceleration ranges. With fewer wear components, they also offer good maintainability.
Linear servo motors are commonly used in processes within semiconductor manufacturing equipment that require especially high‑speed and high‑accuracy positioning.
Stepping motors are control motors that operate with open‑loop control and have a simple mechanical structure..
They are well‑suited for repetitive motions and light‑load applications, making them effective for steady operations such as gas delivery and valve control. In comparison with servo motors, stepping motors are generally lower in cost and are cost‑effective. However, they also have challenges such as position deviation, missed steps, and vibration, and therefore fall short of servo motors in terms of control accuracy.
In semiconductor manufacturing equipment, stepping motors are generally used in processes that require relatively low‑speed operation and do not demand the high functionality or high‑precision positioning of servo motors, such as door‑opening mechanisms.
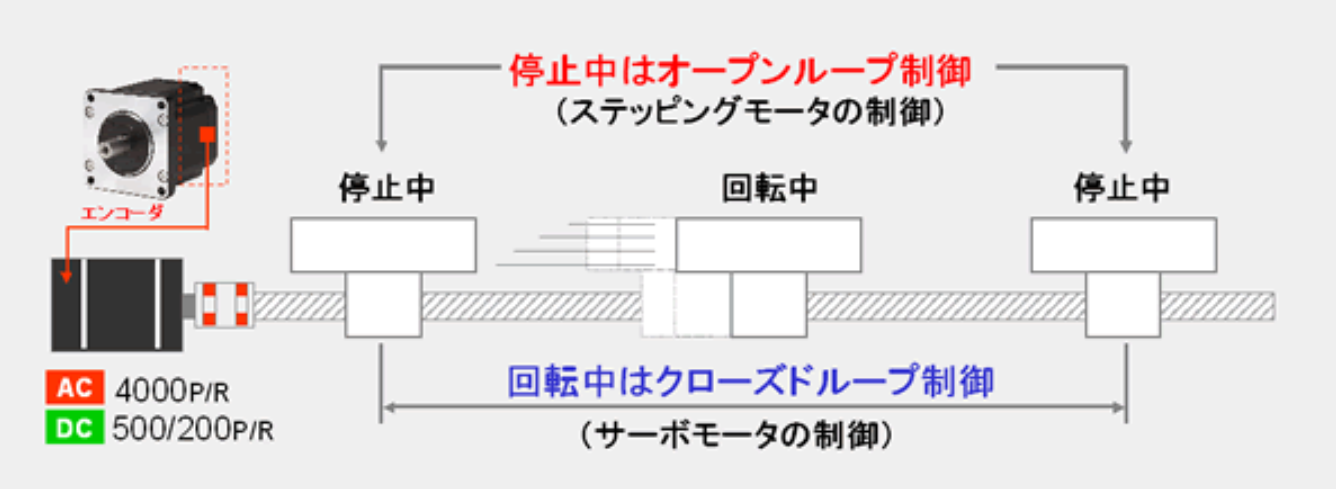
Closed‑loop stepping motors use a control method that automatically switches to closed‑loop control during rotation and to open‑loop control when stopped. This hybrid approach combines the advantages of both servo motors and stepping motors.
Compared with stepping motors, closed‑loop stepping motors prevent missed steps and offer lower vibration and noise, enabling smoother and more reliable motion that approaches the performance of servo motors. In applications that do not require the high functionality and high performance of servo motors, they also enable more cost‑efficient system designs.
In semiconductor manufacturing equipment, closed‑loop stepping motors are often used in processes that prioritize ua balance between performance close to that of servo motors and the simplicity and cost advantages of stepping motors.
| Motor Type | Accuracy | Responsiveness | System Difficulty | Cost | Frequency of Use |
|---|---|---|---|---|---|
| Servo Motors | High | High | High | High | Many |
| Linear Servo Motors | Very high | Very high | High | High | Many |
| Stepping Motors | Medium | Medium | Low | Low | Small |
| Closed Loop Stepping Motors |
High | High | Medium | Medium | Medium |
| Motor Type | Advantages | Limitations |
|---|---|---|
| Servo Motors |
|
|
| Stepping Motors |
|
|
| Closed Loop Stepping Motors |
|
|
Semiconductor manufacturing equipment requires more advanced motor performance than general industrial machinery, as the control demands are significantly higher.
Here, we will focus on servo motors and explain the key performance factors that make them suitable for semiconductor manufacturing equipment.
When selecting a servo motor for semiconductor manufacturing equipment, the first point to consider is whether the motor can reliably drive the load. It is important to evaluate not only the maximum torque and continuous torque, but also whether the momentary peak torque required during acceleration and deceleration is sufficiently supported.
The control accuracy of a servo motor is greatly influenced by the resolution and detection method of its encoder. In processes that require extremely fine positioning, motors equipped with high‑resolution encoders are widely used.
The control bandwidth of a servo motor directly affects its settling time and vibration suppression characteristics. In applications that require repeated high‑speed movement and stopping, it is necessary to consider not only gain tuning of the control system but also the rigidity of the equipment structure and measures to address mechanical resonance.
In semiconductor manufacturing systems, it is often necessary to integrate multiple axes within a constrained installation area. Oversized or heavy motors can limit mechanical layout options and increase structural requirements, making compact and lightweight motors an important design consideration.
A servo system is formed not by the motor alone but through integration with the servo amplifier and higher‑level controllers. Therefore, motor selection should also take into account support for network protocols (such as EtherCAT and EtherNet/IP) as well as expandability for various sensors and safety functions.
As semiconductor manufacturing equipment requires stable, high‑precision operation, vibration and heat generated by the motor can adversely affect the process.
In addition, because these systems tend to have high overall power consumption, motors with high energy efficiency are essential from the perspective of reducing environmental impact and supporting sustainable development.
Some servo amplifiers come equipped with standard safety functions such as brake control and torque limiting. From the perspective of ensuring compliance with system‑level safety standards, it is important to check the safety functions provided by both the motor and the amplifier and incorporate them as needed.
Since many semiconductor manufacturing systems are designed to operate continuously 24 hours a day, the high reliability of servo motors is essential. It is also important to consider long‑term operation when making selections, including the level of support provided by the manufacturer.
SANYO DENKI offers a wide range of control motors to meet the diverse needs of semiconductor manufacturing equipment.
SANMOTION G is an AC servo system that delivers enhanced servo performance and improved energy efficiency.
The speed frequency response has been increased to 3.5 kHz—*1.6 times that of our previous model. The encoder is also available in high‑resolution options, from the standard 23‑bit (*64 times higher than our previous model) up to a maximum of 27‑bit. In addition, its compact and lightweight design helps reduce equipment size and supports space‑saving layouts.
* Our previous model: AC servo system SANMOTION R

They deliver high‑speed, high‑precision linear motion, contributing to shorter cycle times and improved productivity.
Linear servo motors eliminate mechanically contacting and wear‑prone components such as ball screws, contributing to reduced equipment maintenance frequency.
In addition to the flat type, the lineup includes center‑magnet types that cancel magnetic attraction within the motor to simplify machine structures, as well as twin types designed for high acceleration.
Stepping Motors “SANMOTION F” deliver high torque, low vibration, and low noise. Through a redesign of key components and optimized structural engineering, they achieve significant reductions in size and weight while providing high torque output.
The “SANMOTION F” series stepping drivers comply with international product safety standards, including UL standards, as part of their standard specifications. The lineup is extensive, and includes stepping motors designed for linear motion. In addition, a wide range of customization options is available to meet specific customer requirements, such as support for vacuum environments, shaft machining, and damper mounting.
Learn more: Motor Customization Examples

These motors combine the ease of use of stepping motors with the higher reliability typically associated with servo motors, offering the advantages of both types in a single design.
With a position‑detection sensor, they automatically switch to closed‑loop control during rotation and to open‑loop control when stopped.
As a result, they eliminate issues such as missed steps that can occur with conventional stepping motors, contributing to reduced vibration and improved system reliability.
Supervised by: SANYO DENKI CO., LTD., Sales Division, SANMOTION Group
Release date:



Aiming to be the world's No. 1 in manufacturing

Technical capabilities that enable advanced customization

Our 100th anniversary soon

Global Network